Applications of Rotational Conservation Laws
Rolling Motion
Rolling is a complex motion that serves as the bridge between translational (linear) kinematics and rotational kinematics. In AP Physics 1, we analyze rolling primarily through the lens of Energy Conservation and Torque.
The Concept of Rolling Without Slipping
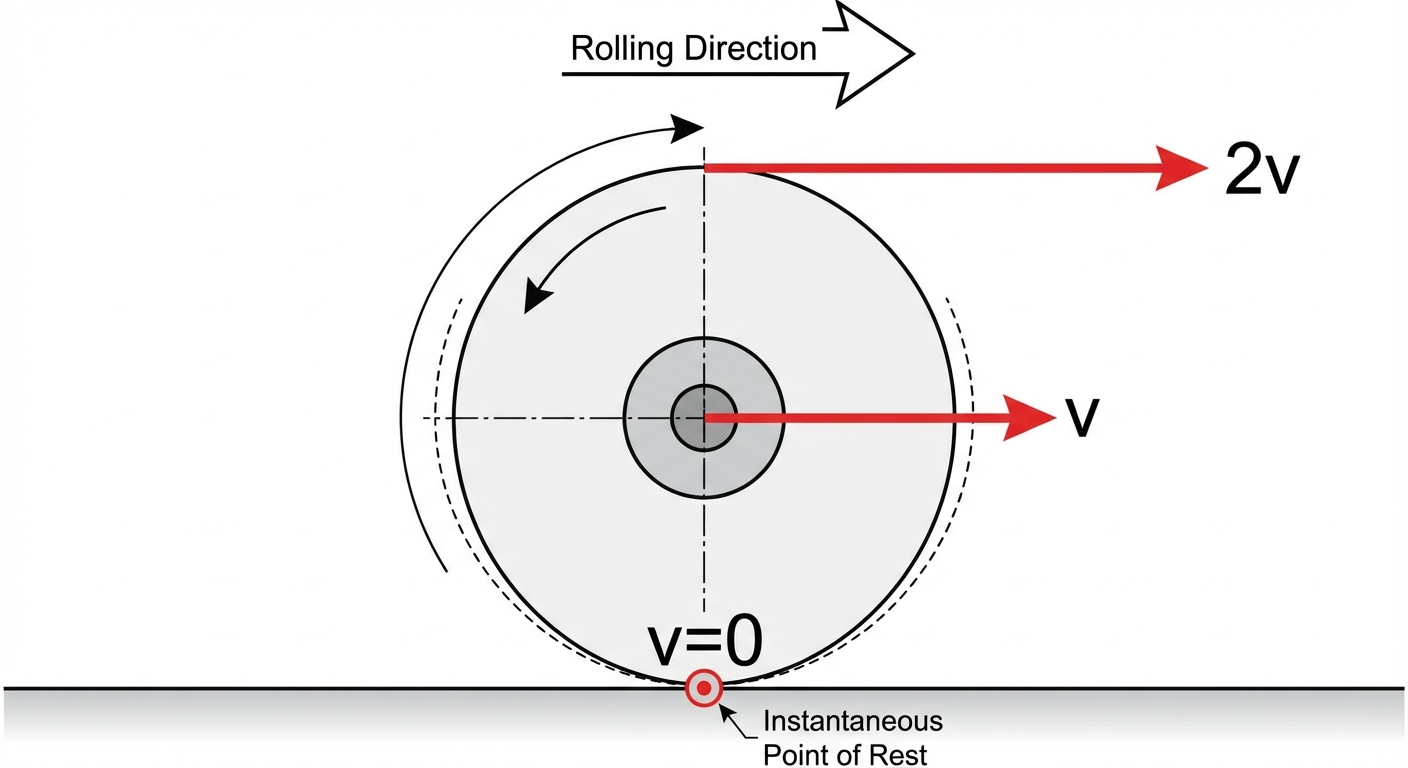
When an object (like a wheel, sphere, or cylinder) rolls across a surface, it exhibits two types of motion simultaneously:
- Translational Motion: The Center of Mass (COM) moves in a straight line with velocity $v_{cm}$.
- Rotational Motion: The object rotates about its center of mass with angular velocity $\omega$.
The condition of rolling without slipping creates a specific mathematical link between these two motions. If the object does not skid, the arc length it rotates through ($s$) is equal to the linear distance it travels ($x$).
The Constraint Equation
For an object of radius $R$ rolling without slipping:
and
Where:
- $v_{cm}$ is the linear velocity of the center of mass.
- $\omega$ is the angular velocity.
- $a_{cm}$ is the linear acceleration.
- $\alpha$ is the angular acceleration.
Note: The point of contact between the rolling object and the ground has an instantaneous velocity of zero relative to the ground. This is why static friction (not kinetic) acts on rolling objects.
Energy in Rolling Systems
Because a rolling object has both linear velocity and angular velocity, it possesses two forms of kinetic energy. The Total Kinetic Energy ($K_{total}$) is the sum of translational and rotational kinetic energy.
When we apply the rolling without slipping constraint ($v = R\omega$ or $\omega = v/R$), we can express the total energy in terms of just one velocity variable. This is crucial for solving ramp problems.
Example Substitution:
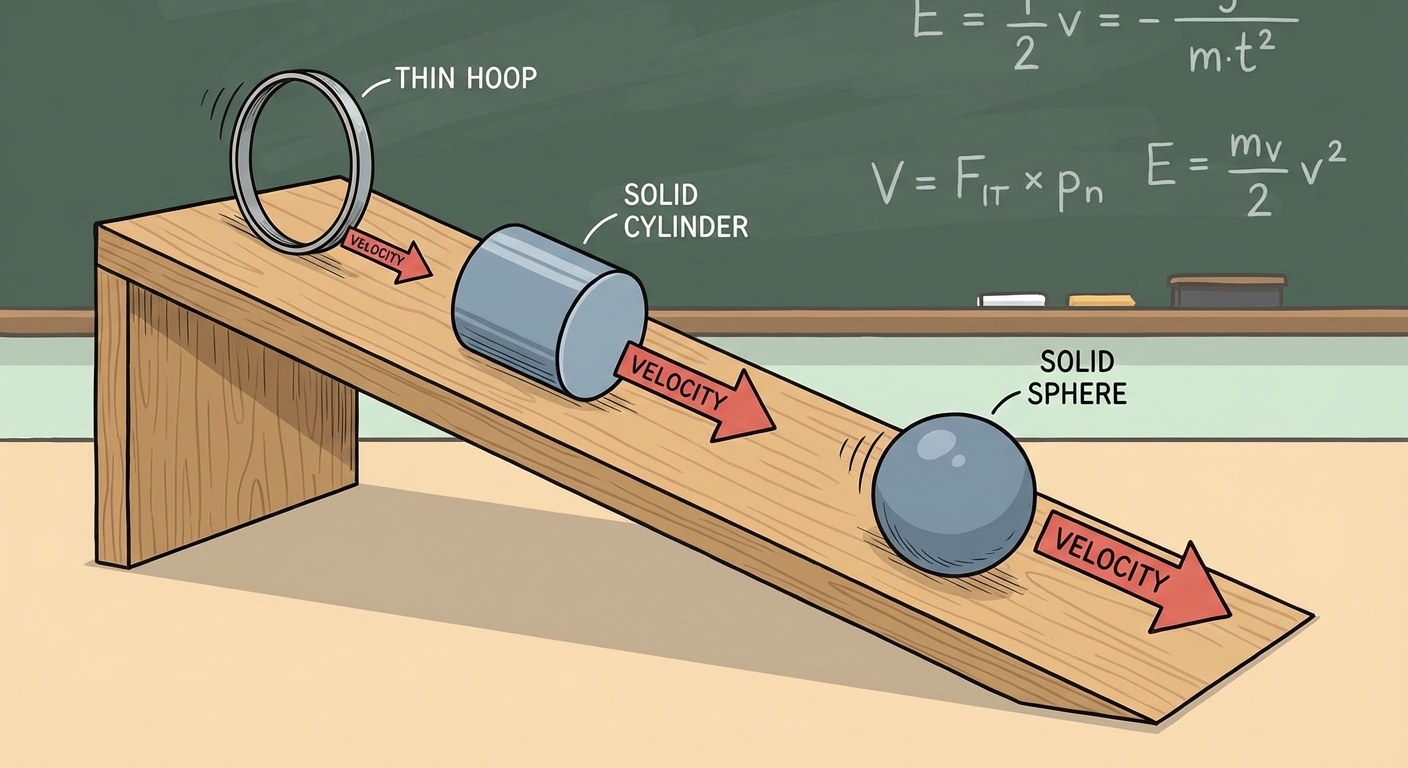
The "Great Race" (Objects on an Incline)
A classic AP Physics 1 exam scenario involves releasing different shapes (hoop, solid sphere, disk, box) from the top of an incline to see which reaches the bottom first.
The Physics Logic:
- Potential Energy ($Ug = mgh$) converts into Kinetic Energy ($K{total}$).
- Objects with a higher Rotational Inertia ($I$) require more energy to get rotating.
- "Hoarding" energy in rotation ($\,\frac{1}{2}I\omega^2$) leaves less energy for translation ($\,\frac{1}{2}mv^2$).
- Therefore, objects with lower rotational inertia (relative to their mass) generally translate faster and win the race.
Ranking (Fastest to Slowest):
- Sliding Box (frictionless): $I=0$. All potential energy goes to $v$. (Fastest)
- Solid Sphere: $I = \frac{2}{5}MR^2$. Small coefficient.
- Solid Cylinder/Disk: $I = \frac{1}{2}MR^2$.
- Hollow Hoop/Ring: $I = MR^2$. Most difficult to rotate. (Slowest)
Forces and Friction in Rolling
Why does an object roll instead of slide? Static Friction.
- Static Friction ($fs$) provides the Torque ($\,\tau = fs R$) required to cause angular acceleration.
- Because the contact point does not move relative to the surface (no slipping), static friction does NO work on the system. Mechanical energy is conserved.
- If the incline is too steep, static friction limits are exceeded, and the object slips (Kinetic friction takes over, and $v \neq R\omega$).
Motion of Orbiting Satellites
While Unit 3 (Gravitation) covers forces in orbits, Unit 6/7 analyzes them through the lens of Angular Momentum and Energy. An orbiting satellite is a "rotating system" where the central body (like Earth or the Sun) acts as the pivot point.
Conservation of Angular Momentum in Orbits
Gravity acts from the satellite directly toward the center of the planet/star. This force vector passes directly through the axis of rotation.
- Torque Lever Arm ($r_{\perp}$) is zero.
- Net Torque ($\tau$) is zero.
- Therefore, Angular Momentum ($L$) is Conserved.
For a point mass (satellite) in orbit, angular momentum is defined as:
(Assuming the velocity vector is perpendicular to the radius vector, which is true at the closest and furthest points of an orbit).
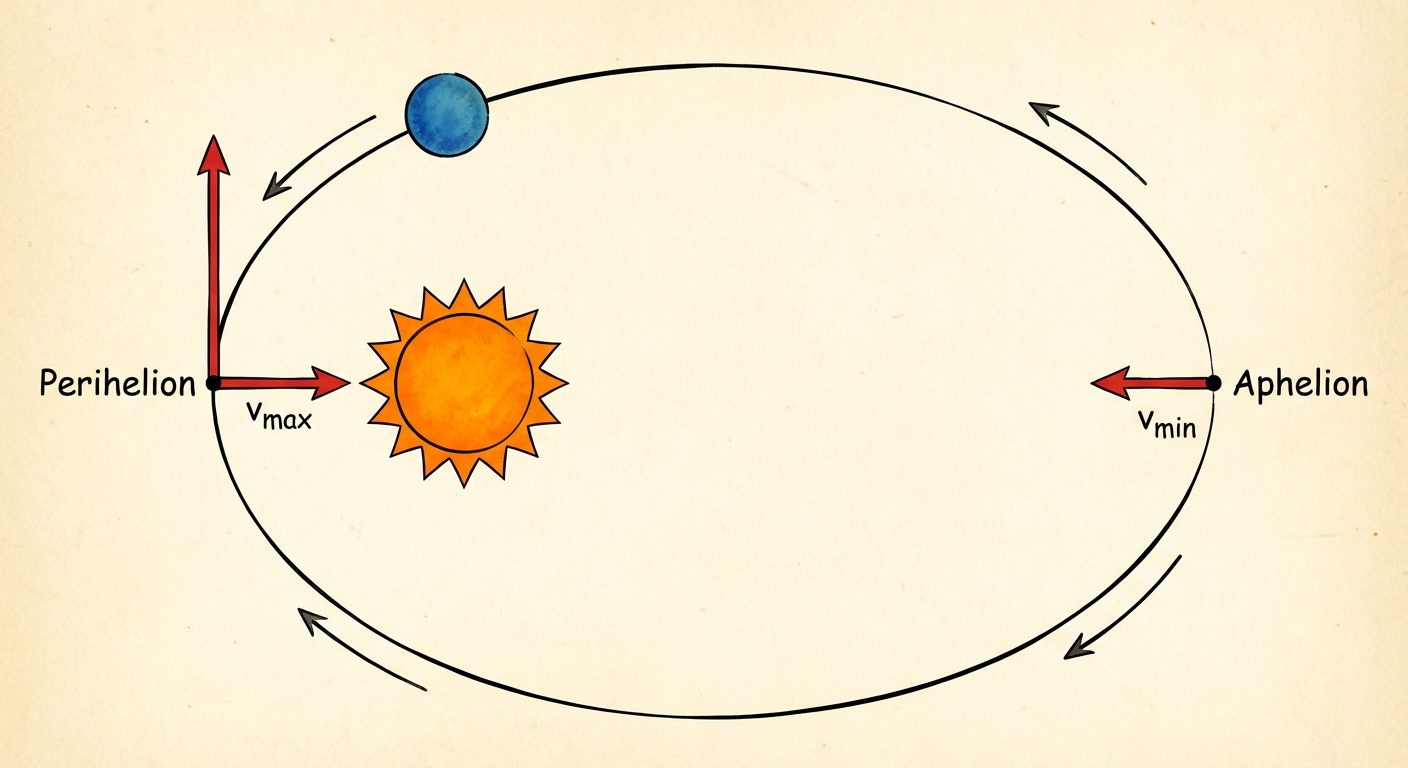
Elliptical Orbits and Velocity
Most orbits are elliptical, not perfectly circular. Conservation of Angular Momentum explains why satellites change speed as they travel.
Using the conservation law ($L1 = L2$):
Since mass ($m$) cancels out:
- Perigee/Perihelion (Closest Approach): $r$ is small, so $v$ must be large.
- Apogee/Aphelion (Furthest Point): $r$ is large, so $v$ must be small.
This is the physical derivation of Kepler's Second Law (Equal areas swept out in equal times).
Energy Considerations in Orbits
A satellite in orbit possesses:
- Kinetic Energy ($K$): Due to orbital speed ($\frac{1}{2}mv^2$).
- Gravitational Potential Energy ($U_g$): Due to distance from the planet.
Total Mechanical Energy ($E$) is conserved in orbit (assuming no atmospheric drag).
As a satellite moves from Aphelion (far) to Perihelion (close):
- Gravity does positive work.
- Potential Energy decreases.
- Kinetic Energy increases (Speed increases).
- Angular Momentum remains constant.
Summary Tables & Mnemonics
Rolling Object Comparison
| Shape | Inertia Formula | Energy Split (at bottom of ramp) | Result |
|---|---|---|---|
| Box (frictionless) | $0$ | 100% Translation | Fastest |
| Solid Sphere | $\frac{2}{5}MR^2$ | High Trans / Low Rot | 2nd Place |
| Solid Cylinder | $\frac{1}{2}MR^2$ | Med Trans / Med Rot | 3rd Place |
| Hoop | $1MR^2$ | Low Trans / High Rot | Slowest |
Memory Trick: "The Lazy Hoop"
"Hollow implies Slow."
A hollow object (Hoop) has its mass as far from the center as possible. It is "lazy" (high rotational inertia) and refuses to speed up linearly, preferring to spin instead.
Common Mistakes & Pitfalls
Confusing Friction Types:
- Mistake: Thinking kinetic friction acts on a rolling wheel.
- Correction: If it says "rolling without slipping," it is Static Friction. It provides torque but does not take energy out of the system.
Forgetting $I$ in Energy Equations:
- Mistake: Writing $E = mgh = \frac{1}{2}mv^2$ for a rolling ball.
- Correction: You MUST add the rotational term: $mgh = \frac{1}{2}mv^2 + \frac{1}{2}I\omega^2$. The ball is slower than you think!
Applying $v=r\omega$ Everywhere:
- Mistake: Using the constraint equation when an object is sliding (bowling ball initially thrown).
- Correction: $v = r\omega$ is ONLY true if there is no slipping. If the problem involves skidding, these variables are independent until traction is gained.
Radius Confusion in Orbits:
- Mistake: Using the altitude of the satellite as $r$.
- Correction: In both Torque/Angular Momentum and Gravitation, $r$ is the distance from the center of the planet to the satellite ($r = R_{planet} + \text{altitude}$).