Comprehensive Guide to Unit 5: Torque and Rotational Dynamics
Rotational Kinematics
Before diving into forces and torques, we must establish the language of rotational motion. Just as we use displacement, velocity, and acceleration for linear motion, we have angular counterparts for objects spinning around an axis.
Describing Rotation
When a rigid body rotates about a fixed axis, every particle in the body moves in a circle. We describe this motion using three fundamental quantities:
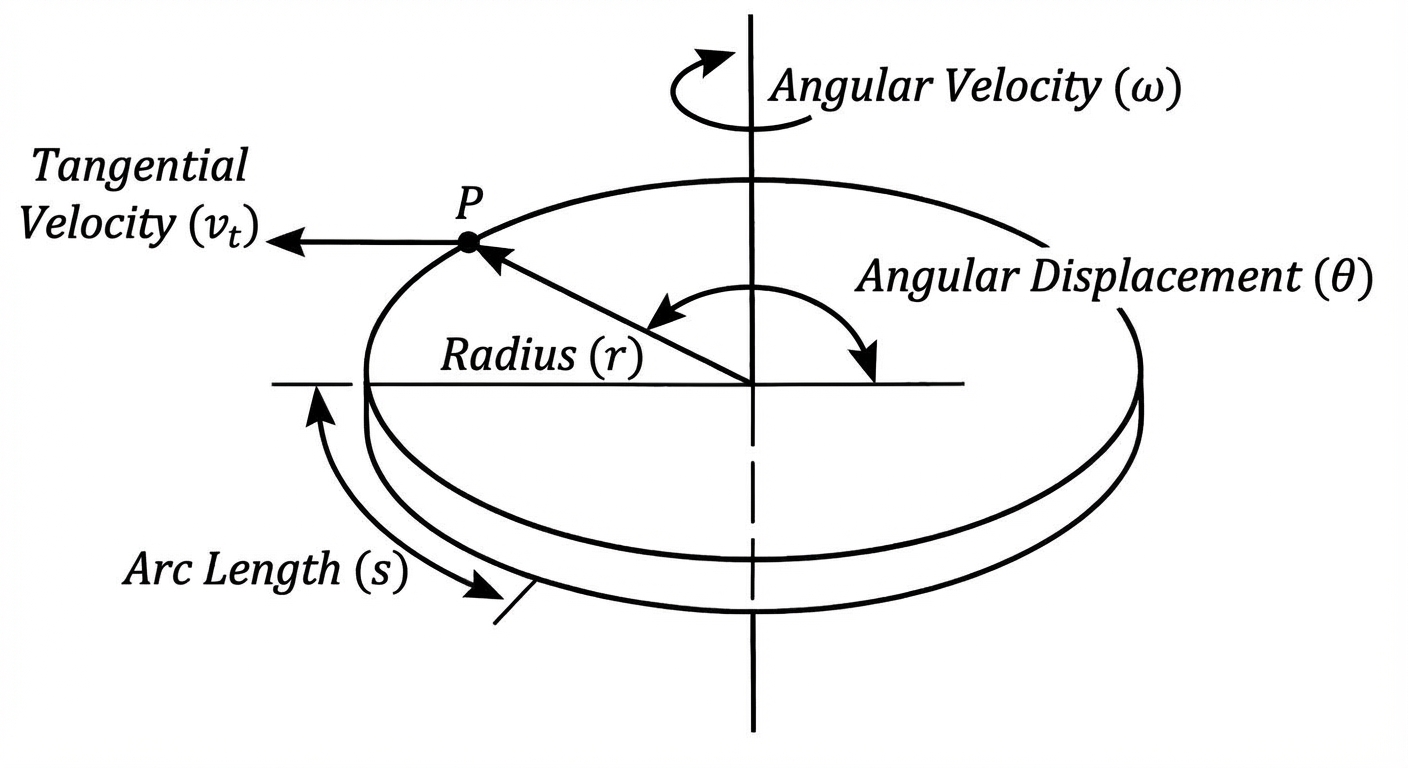
Angular Position ($\theta$): The angle through which a point or line has been rotated in a specified sense about a specified axis.
- Standard Unit: Radians (rad).
- Conversion: $360^\circ = 2\pi \text{ rad}$.
Angular Velocity ($\omega$): The rate of change of angular position.
- Formula:
- Unit: Radians per second (rad/s).
- Direction: By convention, counter-clockwise (CCW) is positive, and clockwise (CW) is negative.
Angular Acceleration ($\alpha$): The rate of change of angular velocity.
- Formula:
- Unit: Radians per second squared (rad/s$^2$).
The Bridge Equations: Linear vs. Angular
A critical skill in AP Physics 1 is translating between the linear motion of a specific point on a rotating object (tangential motion) and the rotation of the object as a whole.
At a distance $r$ from the axis of rotation:
| Quantity | Linear Formula | Relationship |
|---|---|---|
| Arc Length | $s = r\theta$ | Linear distance traveled along the curve |
| Tangential Velocity | $v_t = r\omega$ | Instantaneous linear speed tangent to the path |
| Tangential Acceleration | $a_t = r\alpha$ | Linear acceleration tangent to the path |
Note: Every point on a rotating rigid body has the same $\omega$ and $\alpha$, but points further from the center (larger $r$) have a higher tangential speed $v_t$.
Rotational Kinematic Equations
Because the math governing constant acceleration is the same regardless of the variable names, the kinematic equations for rotation are identical in form to the linear ones. These apply only when $\alpha$ is constant.
Torque and Rational Statics
While force causes linear acceleration, Torque ($\tau$) is the ability of a force to cause angular acceleration (rotation).
Defining Torque
Torque depends on three factors: how hard you push, where you push, and the angle at which you push.
- $\tau$: Torque ($N\cdot m$)
- $r$: Distance from the axis of rotation to the point where force is applied (lever arm distance)
- $F$: Magnitude of the force applied
- $\theta$: The angle between the lever arm vector ($r$) and the force vector ($F$)
Maximum Torque occurs when the force is applied perpendicular to the lever arm ($\theta = 90^\circ$, so $\sin\theta = 1$). No torque is produced if the force points directly at or away from the pivot ($\theta = 0^\circ$ or $180^\circ$).
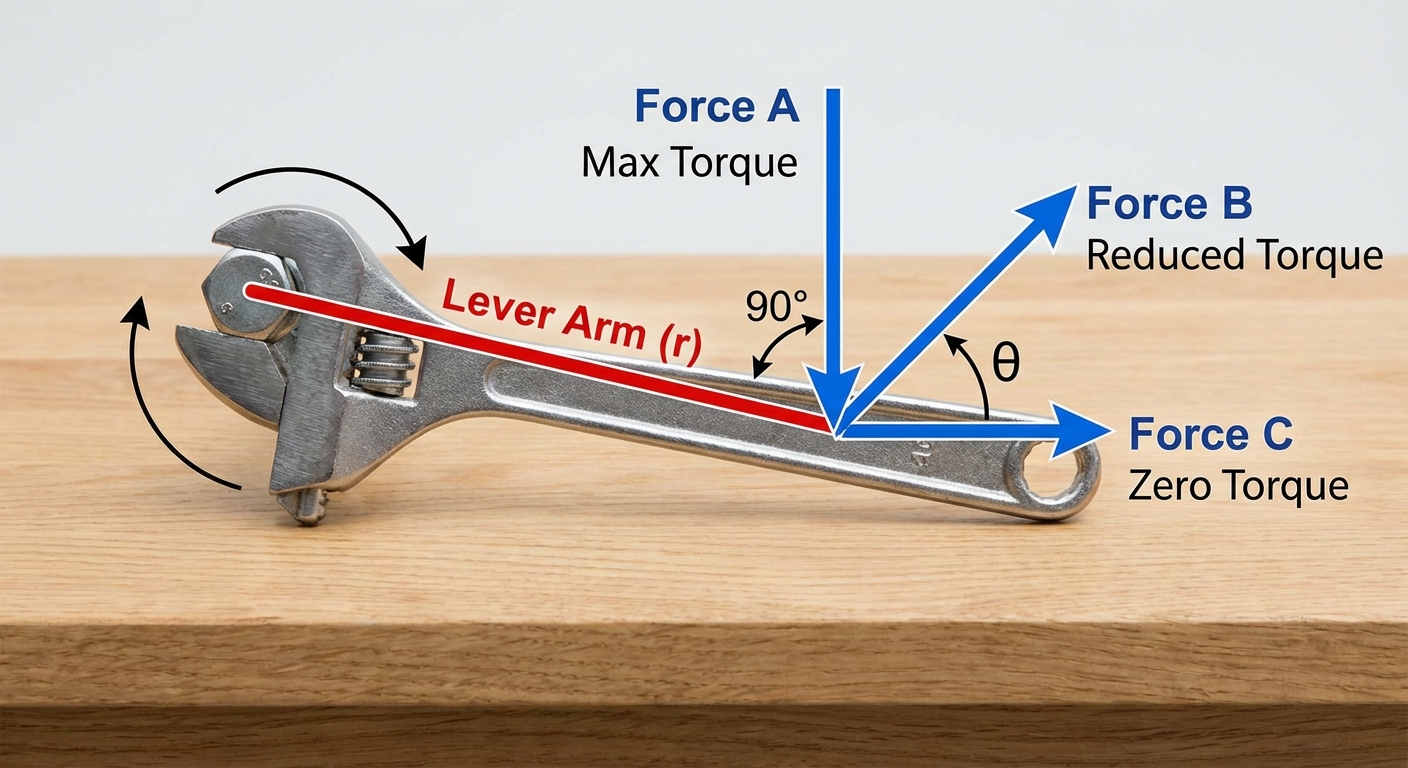
The Lever Arm
Alternatively, torque can be calculated using the lever arm (or moment arm, denoted as $r_\perp$). This is the perpendicular distance from the axis of rotation to the "line of action" of the force.
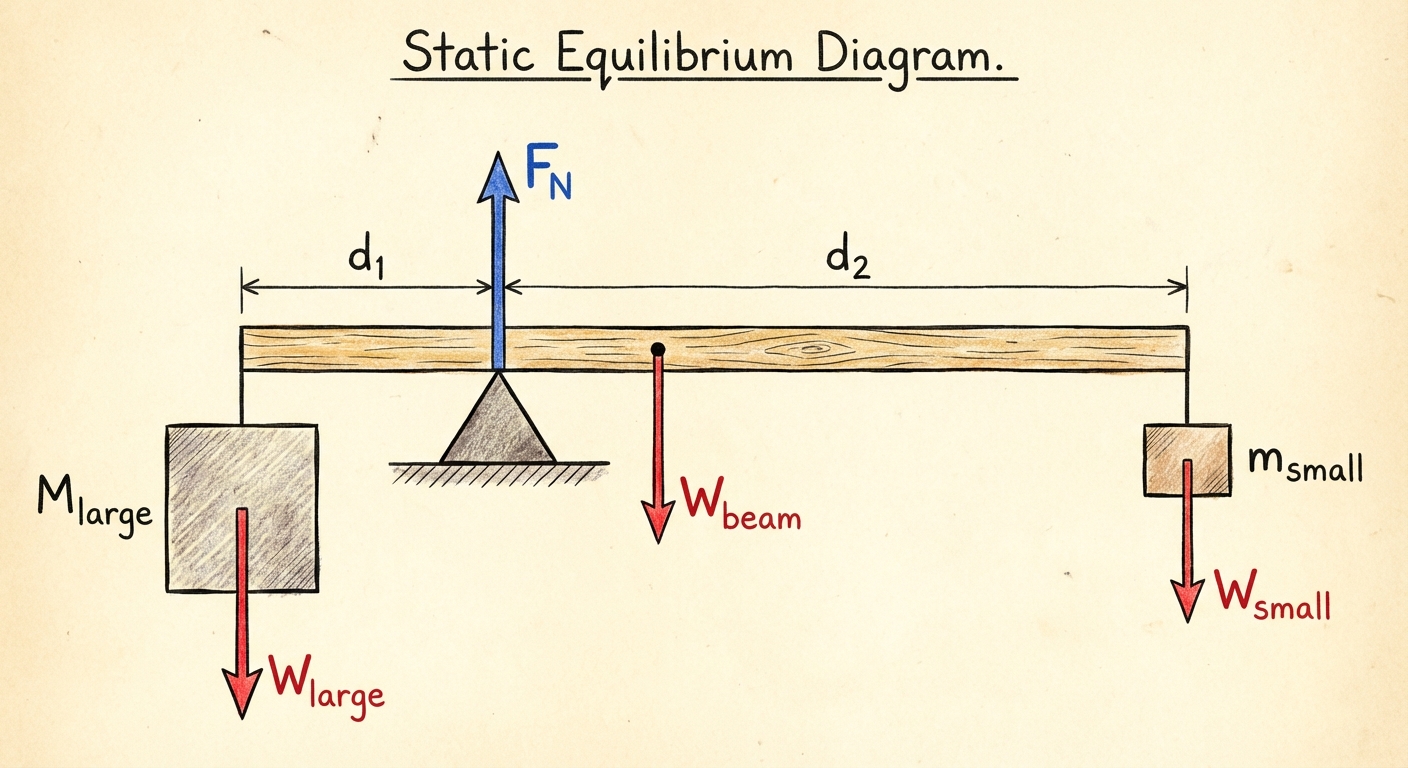
Static Equilibrium
For an object to be truly static (not moving linearly and not rotating), two conditions must be met:
- Translational Equilibrium: The net force is zero.
- Rotational Equilibrium: The net torque is zero.
Problem Solving Strategy for Equilibrium:
- Draw an extended Free Body Diagram (FBD) showing exactly where forces act.
- Choose an axis of rotation. Pro-Tip: Choose a pivot point where an unknown force acts. This eliminates that force from the torque equation because $r=0$.
- Determine the sign of the torque. Usually, CCW is positive (+) and CW is negative (-).
- Set $\Sigma \tau{CW} = \Sigma \tau{CCW}$ or $\Sigma \tau = 0$.
Rotational Inertia and Newton's 2nd Law
Rotational Inertia (Moment of Inertia)
Just as Mass is the resistance to changes in linear velocity, Rotational Inertia (or Moment of Inertia, $I$) is the resistance to changes in angular velocity.
Key Concept: Rotational inertia depends on two things:
- The total mass of the object.
- How the mass is distributed relative to the axis of rotation.
Mass distributed further from the axis results in a larger $I$, making the object harder to start or stop spinning.
Common Shapes (for reference, usually provided):
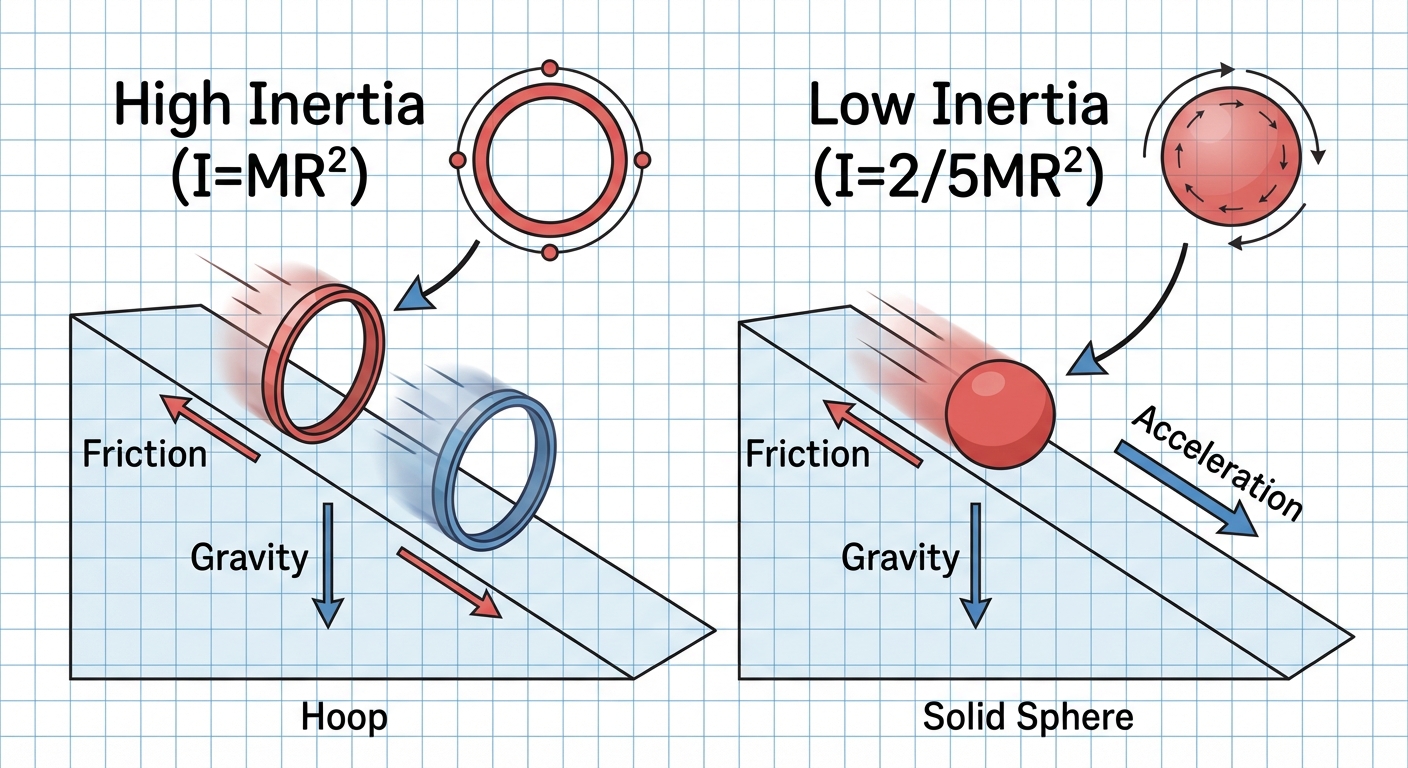
- Hoop/Ring: $I = MR^2$ (All mass is far from center—highest inertia).
- Solid Cylinder/Disk: $I = \frac{1}{2}MR^2$.
- Solid Sphere: $I = \frac{2}{5}MR^2$ (Mass is concentrated near the center—lowest inertia).
Newton's Second Law for Rotation
The linear law $\Sigma F = ma$ translates directly to rotation:
- $\Sigma \tau$: Net Torque ($N\cdot m$)
- $I$: Rotational Inertia ($kg\cdot m^2$)
- $\alpha$: Angular Acceleration ($rad/s^2$)
Common Mistake: When solving systems (like a falling block unwinding a pulley), students often forget that the tension in the rope causes a torque on the pulley. If the pulley has mass, the tension on two sides of the pulley is not the same.
Rotational Kinetic Energy
Rotating objects possess kinetic energy due to their motion.
Rolling Motion (Rolling without Slipping)
When an object rolls, it has both translational kinetic energy (movement of the center of mass) and rotational kinetic energy (spinning about the center).
Because the object rolls without slipping, we can use the bridge equation $v = R\omega$ to substitute variables.
Concept Check: If a hoop and a solid sphere of equal mass and radius race down a ramp, which wins?
- Answer: The Sphere wins.
- Why?: The hoop has a higher rotational inertia ($I=MR^2$). Therefore, more of its potential energy ($Ug$) must be converted into rotational kinetic energy ($K{rot}$), leaving less energy for translational velocity ($K{trans}$). The sphere, which is easier to rotate, converts more $Ug$ directly into speed ($v$).
Angular Momentum
Angular momentum ($L$) is the measure of how difficult it is to stop a rotating object. It is a vector quantity.
- $L$: Angular Momentum ($kg\cdot m^2/s$)
For a point particle moving in a straight line relative to an axis:
(Where $r$ is distance to the axis).
Angular Impulse
Just as Force is the change in linear momentum, Torque is the change in angular momentum.
Conservation of Angular Momentum
If the net external torque on a system is zero, the total angular momentum of the system remains constant.
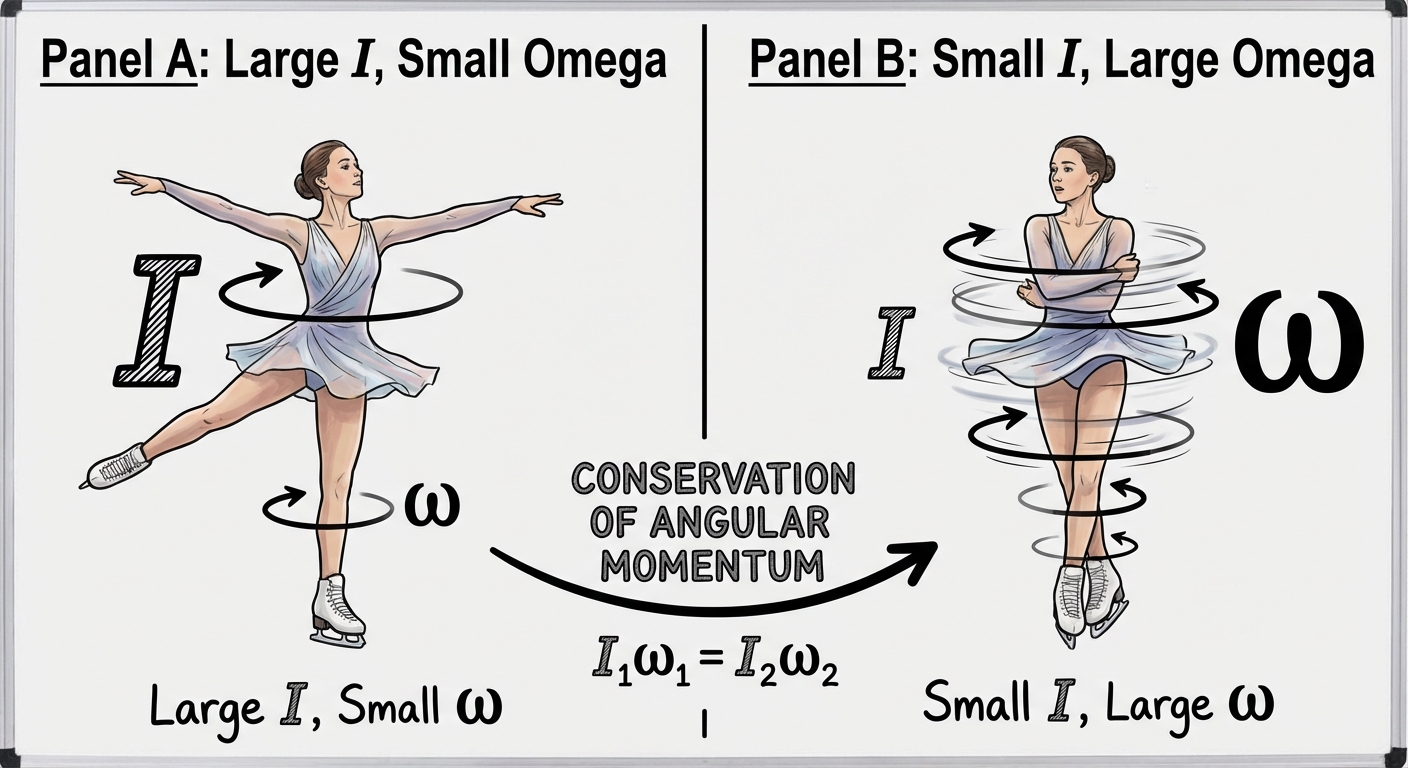
Classic Example: The Variable Inertia
A figure skater spinning with arms outstretched has a large $Ii$ and low $\omegai$. When she pulls her arms in:
- Inertia decreases (mass moves closer to axis).
- Angular Momentum is conserved (no external torque).
- Angular Velocity increases to compensate ($I \downarrow$, $\omega \uparrow$).
Common Mistakes & Pitfalls
Radians vs. Degrees: Always keep your calculator in Degree mode for forces/geometry, but remember that the kinematic formulas ($\omega$, $\alpha$) inherently assume Radians. If you plug degrees into equations like $s=r\theta$, the answer will be wrong.
Mixing $v$ and $\omega$: Do not confuse linear speed with angular speed. A bug on the rim of a wheel has the same $\omega$ as a bug near the center, but a much higher $v$ (linear speed).
The Pivot Point in Equilibrium: In static problems, torque depends entirely on the chosen pivot. Students often calculate torque about different pivots for different forces in the same equation. You must calculate all torques relative to a single axis of rotation.
Ignoring Rotational Inertia in Energy: When solving conservation of energy problems (like a ball rolling down a ramp), students frequently forget the $\frac{1}{2}I\omega^2$ term. If it's rolling, kinetic energy is split between moving and spinning.
Signs of Torque: Be consistent. If you define CCW as positive (standard), ensure every force trying to rotate the object CW creates a negative torque.
Point Particle vs. Extended Object: Angular momentum applies to point particles too! A runner running past a pole has angular momentum relative to that pole ($L = mvr$).