AP Physics 1: Force and Systems Dynamics
Systems and Center of Mass
In AP Physics 1, defining the System is the most critical first step in solving dynamics problems. A system is a collection of objects that you choose to analyze as a single unit or distinct entities.
Defining the System Boundary
- The System: The object or group of objects you are analyzing.
- The Environment: Everything outside the system.
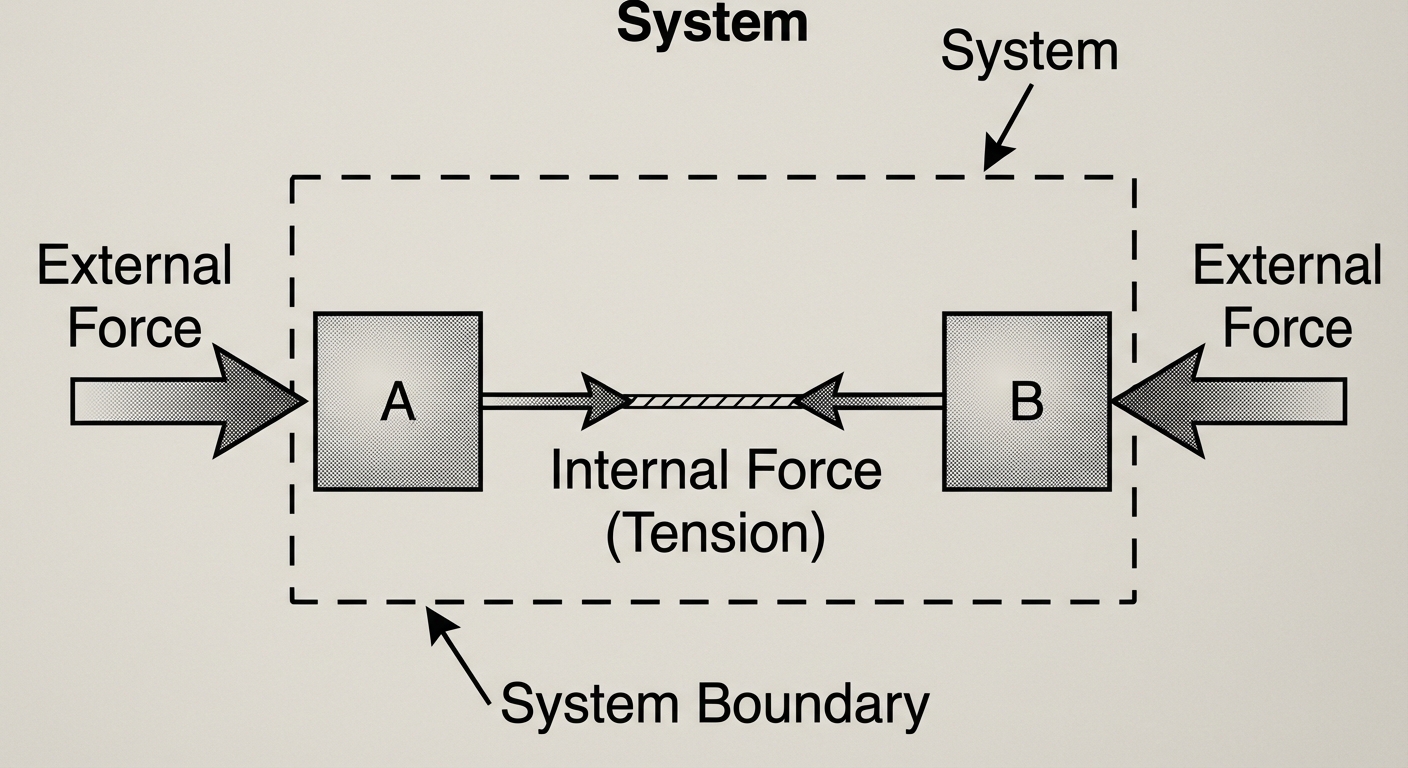
- System Boundary: An imaginary line separating the system from the environment.
Crucially, how you define the system determines whether forces are internal or external.
- Internal Forces: Forces between objects within the system. Usually, these cancel out due to Newton's Third Law and do not cause the system's center of mass to accelerate.
- External Forces: Interactions crossing the system boundary (from the environment acting on the system). Only external forces cause acceleration ().
Center of Mass
The Center of Mass is the unique point where the weighted relative position of the distributed mass sums to zero. For uniform objects, it is the geometric center.
Key Concept: When a net external force acts on an extended system (like a diver flipping or a wrench spinning in space), the Center of Mass follows a simple parabolic trajectory, acting as if all the mass were concentrated at that single point, even if the individual parts are rotating or moving chaotically.
Forces and Free-Body Diagrams
A Force is a vector interaction between two objects that can cause a change in motion (acceleration).
Fundamental Forces in Unit 2
- Gravitational Force ( or ): A field force attracting objects with mass toward the Earth's center.
- Normal Force (): A contact force perpendicular to the surface. It prevents objects from passing through each other.
- Tension (): A pulling force transmitted axially through a string, cable, or rope. Ideal strings in AP Physics 1 are massless and inextensible.
- Friction (): A resistive contact force parallel to the surface, opposing the direction of relative motion (kinetic) or potential motion (static).
- Applied Force (): A generic push or pull.
Drawing Free-Body Diagrams (FBDs)
The FBD is the primary tool for analyzing forces. On the AP Exam, drawing this correctly is often worth points.
The Rules of the FBD:
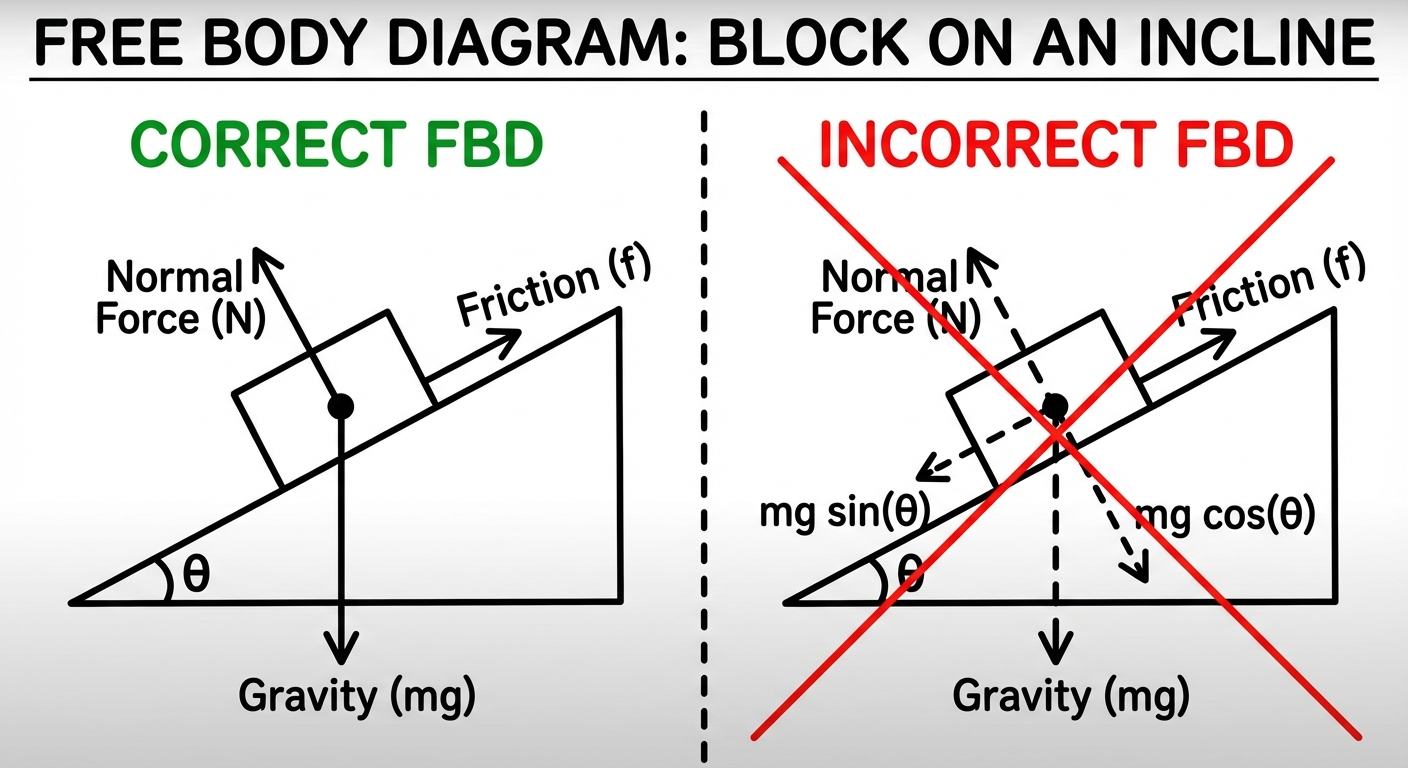
- Represent the object as a dot or a simple box.
- Draw forces as arrows originating from the center of the dot and pointing away.
- Label every vector (e.g., , ).
- NEVER draw components (like ) on the official FBD. Components are for your math scratchpad, not the diagram.
- NEVER include internal forces if treating multiple objects as one system.
Newton's Third Law
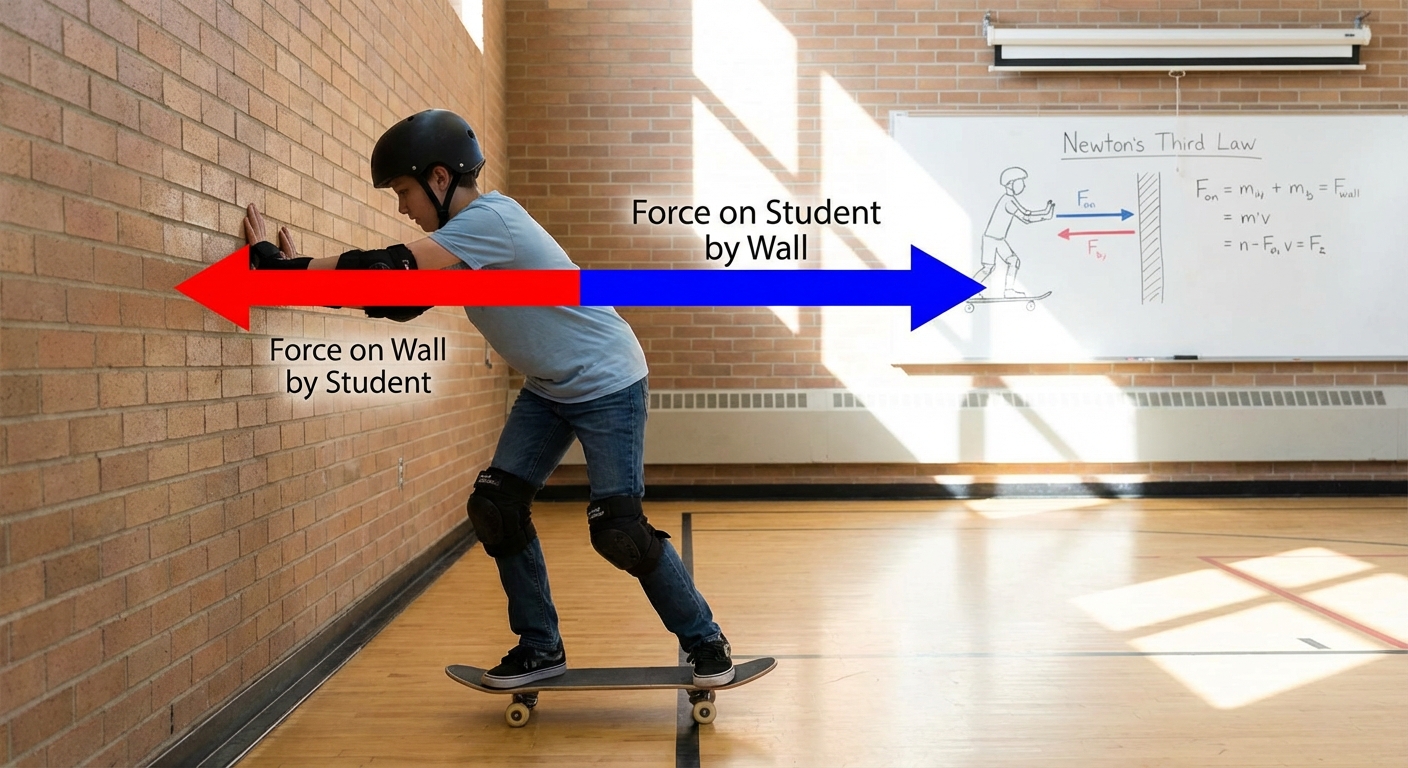
"For every action, there is an equal and opposite reaction."
While the mnemonic is catchy, the physics definition is specific: Forces always exist in Interaction Pairs.
The Law of Interaction
If Object A exerts a force on Object B, then Object B exerts a force on Object A that is:
- Equal in magnitude
- Opposite in direction
- Simultaneous
- Act on different objects
Example: If a mosquito hits a windshield, the force of the mosquito on the truck is mechanically equal to the force of the truck on the mosquito. The results (acceleration/squished bug) differ because their masses differ, not because the forces differ.
Newton's First Law
The Law of Inertia: An object at rest stays at rest, and an object in motion stays in motion with a constant velocity, unless acted upon by a net external force.
Inertial Mass
Inertia is the property of an object to resist changes in its state of motion. Mass is the quantitative measure of inertia.
Equilibrium
When the net force is zero (), the object is in equilibrium.
- Static Equilibrium: The object is at rest (, ).
- Dynamic Equilibrium: The object moves at a constant velocity (, ).
If you see "constant speed in a straight line" in a problem, immediately write: .
Newton's Second Law
This is the bridge between force and motion.
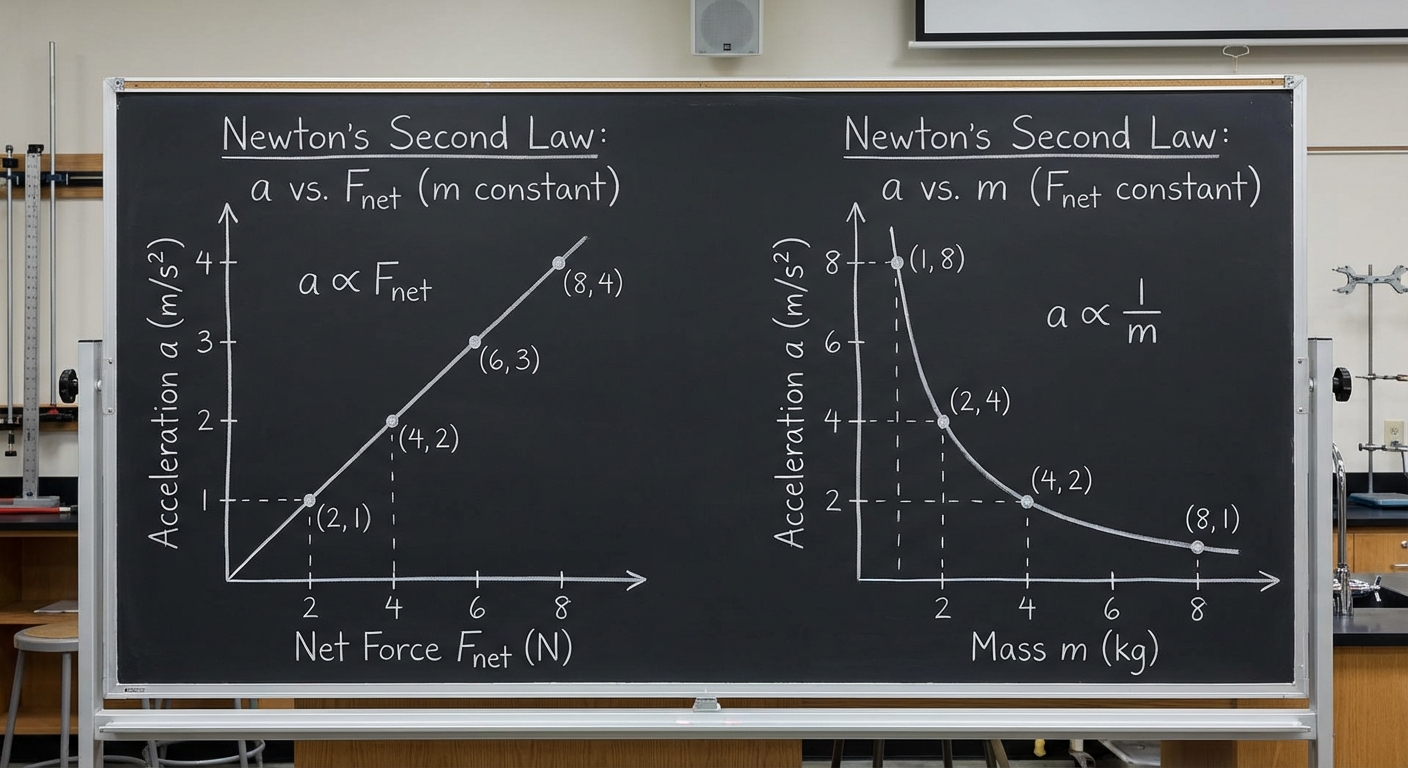
The Equation
The acceleration of a system is directly proportional to the net external force and inversely proportional to the system's mass.
Where:
- is the Net Force (vector sum of all external forces).
- is the Inertial Mass of the system.
Applying the Second Law (Step-by-Step)
- Sketch: Draw the scenario.
- System: Circle the object(s) of interest.
- FBD: Draw external forces acting on your system.
- Axes: Define positive directions. (Tip: Align the x-axis with the acceleration).
- Equations: Write and .
Worked Example: The Modified Atwood Machine
Scenario: A cart of mass on a frictionless table is connected by a string to a hanging mass . Find the acceleration.
Approach 1: The Definition of System
- System: The Cart + The Hanging Mass (Total Mass = ).
- External Forces: Gravity on () attempts to accelerate the system. Gravity on is canceled by the Normal force. Tension is internal and cancels out.
- Newton's 2nd Law:
Common Mistakes & Pitfalls
- Drawing Components on the FBD: This acts as "double counting" the force and will lose you points. Break vectors into components separately.
- Confusing 3rd Law Pairs: Gravity () and Normal Force () are NOT an action-reaction pair because they act on the same object. The reaction to Earth pulling the block is the block pulling the Earth up.
- Ignoring System Mass: When treating connected objects as one system, remember the in is the total mass of all moving parts.
- Passive vs. Active Forces: Students often forget that Normal force and Tension are "smart" forces; they only exert as much force as necessary to maintain constraints (until they break).