Mastering Rotational Motion: Variables and Kinematics
Rotational Kinematics: The Basics
Before diving into why things rotate (Torque), we must first master how to describe Rigid Body Rotation. In AP Physics 1, we assume objects are rigid bodies, meaning they don't stretch or deform while rotating. All points on the object rotate with the same angular velocity, even though they might move at different linear speeds depending on their distance from the center.
Angular Variables
To describe rotation, we replace our standard linear variables ($x, v, a$) with their Greek angular counterparts.
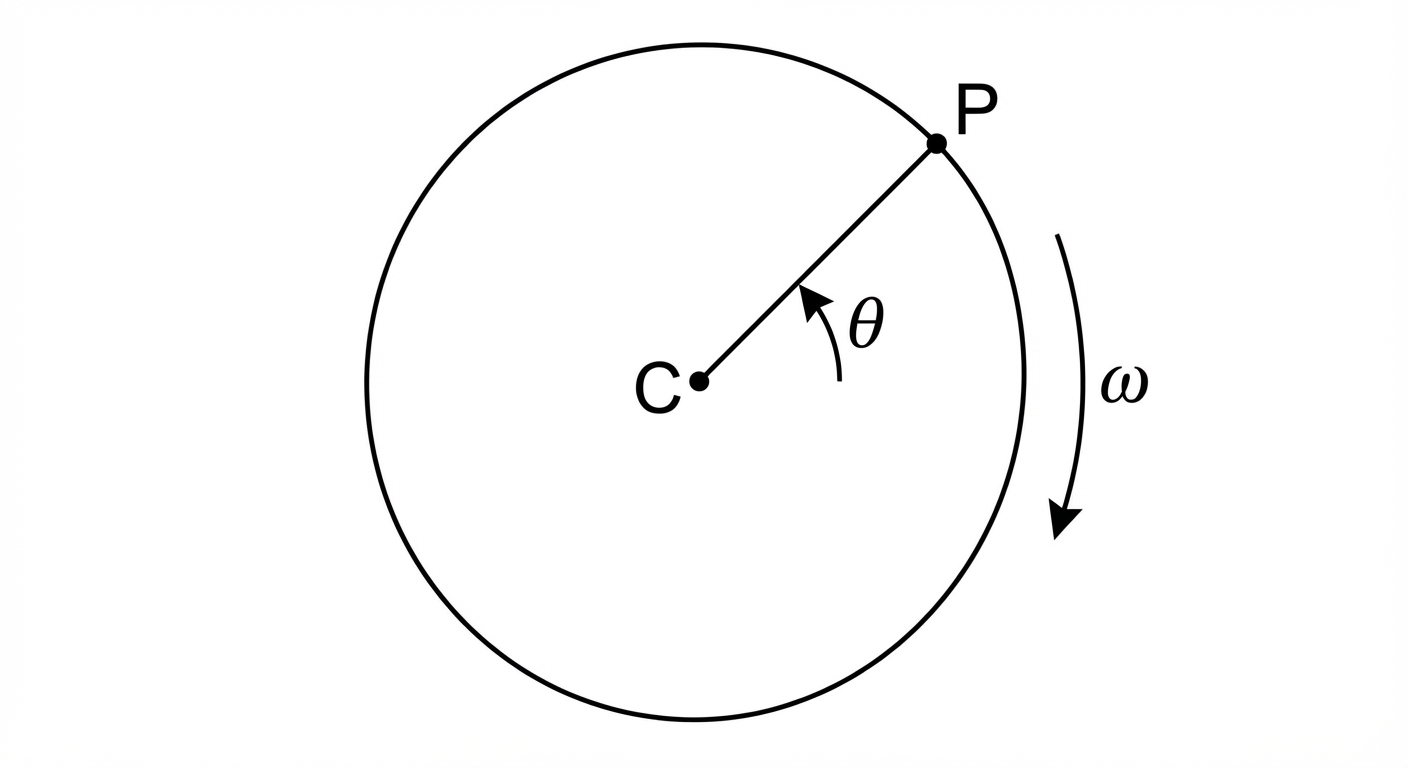
1. Angular Position and Displacement ($\theta$)
Instead of measuring how many meters an object has moved, we measure how much it has rotated.
- Definition: The angle through which a point, line, or body is rotated in a specified direction and about a specified axis.
- Symbol: $\theta$ (Theta)
- Standard Unit: Radians (rad). While degrees and revolutions are used in problems, you must convert to radians when using physics formulas connecting linear and rotational motion.
- Sign Convention:
- Counter-Clockwise (CCW): Positive (+)
- Clockwise (CW): Negative (-)
2. Angular Velocity ($\omega$)
This measures how fast an object is spinning and in which direction.
- Definition: The rate of change of angular position.
- Symbol: $\omega$ (Omega)
- Formula:
- Units: radians per second (rad/s).
3. Angular Acceleration ($\alpha$)
If an object is speeding up or slowing down its rotation, it has angular acceleration.
- Definition: The rate of change of angular velocity.
- Symbol: $\alpha$ (Alpha)
- Formula:
- Units: radians per second squared (rad/s²).
The Kinematic Equations (Rotational Form)
Because the mathematical relationship between position, velocity, and acceleration is the same for rotation as it is for linear motion, we can translate the "Big Three" (or Big Five) kinematic equations directly. These are valid only when angular acceleration ($\alpha$) is constant.
| Linear Concept | Linear Equation | Rotational Equation (Angular) |
|---|---|---|
| Displacement | $\Delta x$ | $\Delta \theta$ |
| Velocity | $v$ | $\omega$ |
| Acceleration | $a$ | $\alpha$ |
| First Equation | $vf = vi + at$ | |
| Second Equation | $\Delta x = v_i t + \frac{1}{2}at^2$ | |
| Third Equation | $vf^2 = vi^2 + 2a\Delta x$ |
Connecting Linear and Rotational Motion
One of the most frequent question types on the AP exam asks you to relate the angular motion of a spinning object to the linear motion of a point on its edge (tangential motion) or the linear motion of the object itself (if it is rolling).
The "Bridge" Equations
To go from rotational to linear quantities, you generally multiply by the radius ($r$).
Arc Length (Distance traveled on the rim):
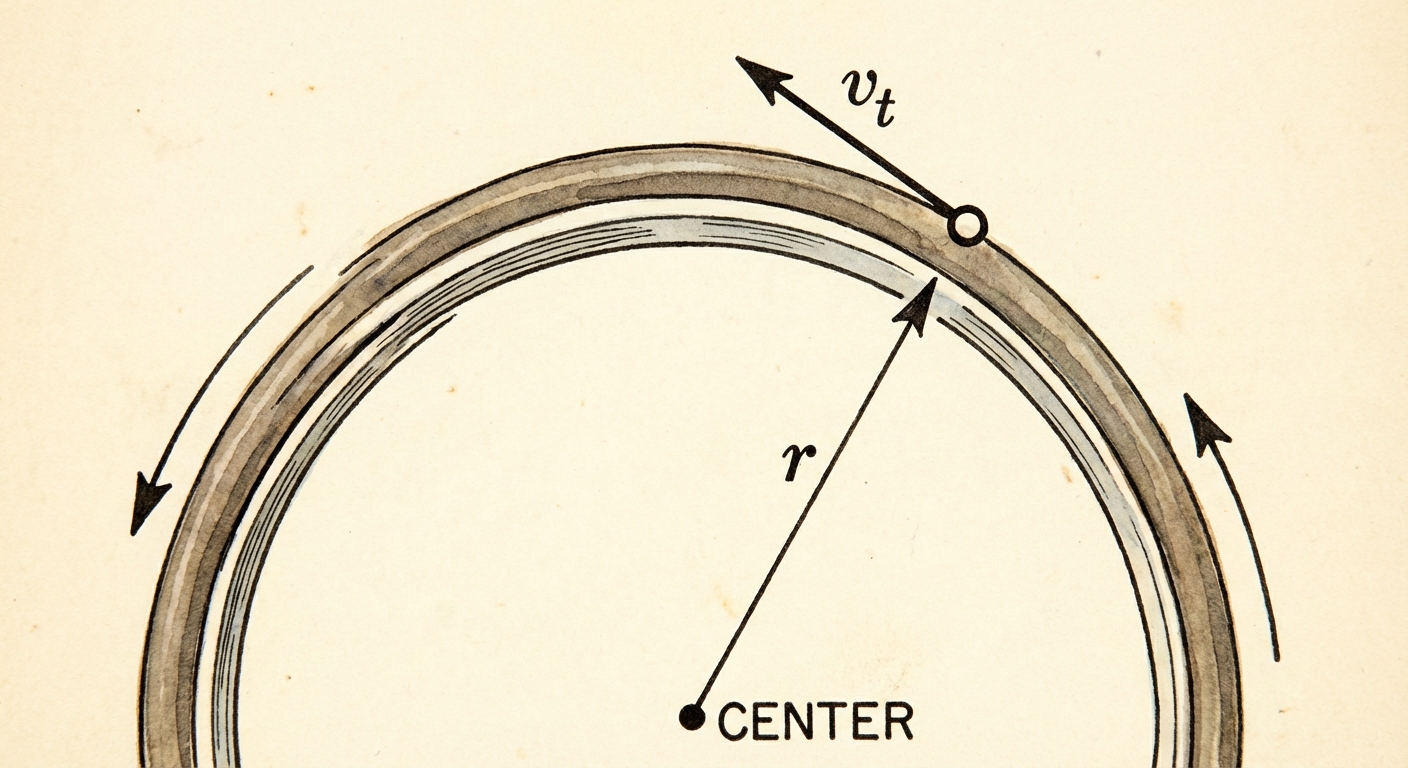
(Note: $\theta$ must be in radians)Tangential Velocity ($vt$):
This is the instantaneous linear speed of a point on the edge of the rotating object.Tangential Acceleration ($at$):
This represents how fast the point on the rim is speeding up or slowing down along the circular path.
Total Acceleration: Tangential vs. Centripetal
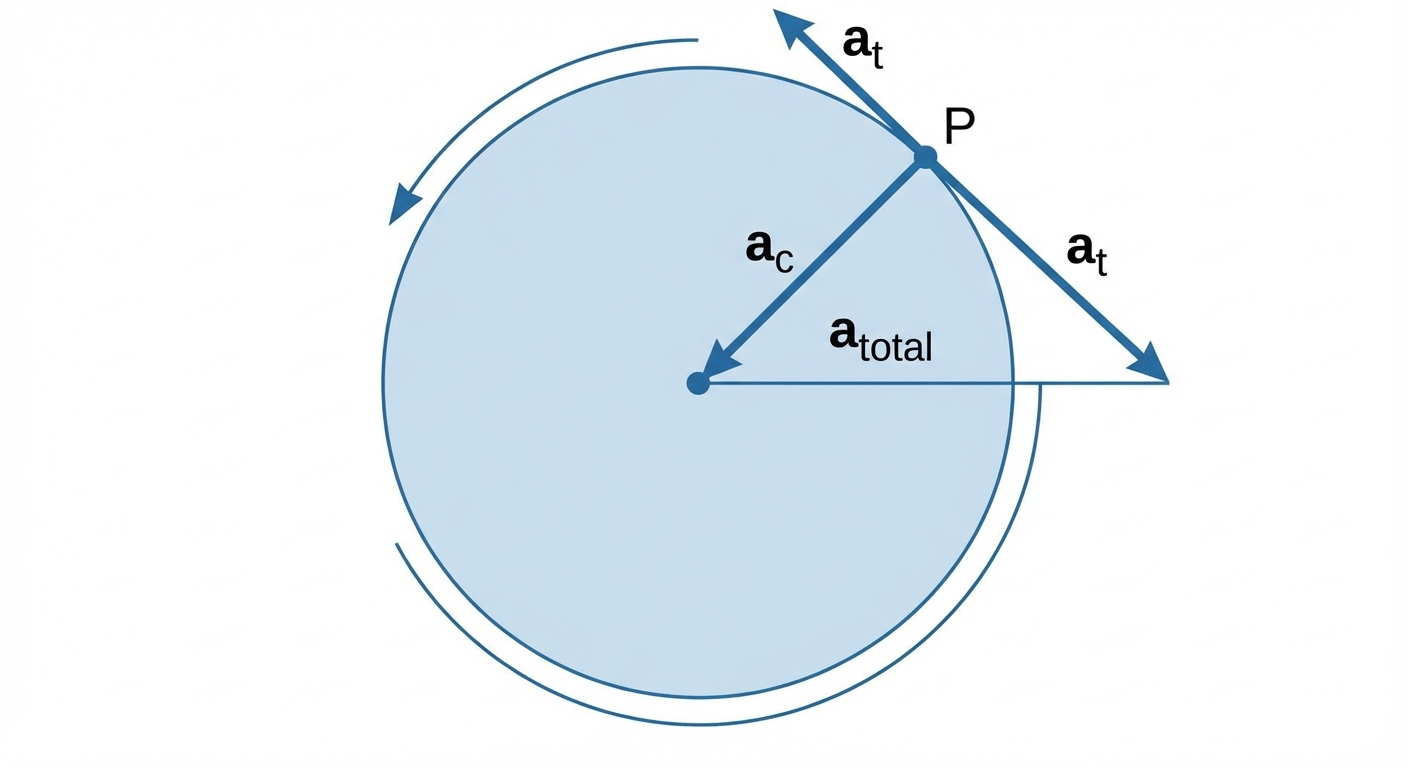
A point on a rotating object can have two types of linear acceleration simultaneously:
Tangential Acceleration ($at$): Changes the magnitude of the velocity (speeding up or slowing down the spin). caused by a net torque.
Centripetal (Radial) Acceleration ($ac$): Changes the direction of the velocity (keeping the point moving in a circle). This exists whenever the object is spinning ($v \neq 0$), even if angular speed is constant.
The total linear acceleration vector is the vector sum of these two components, which are perpendicular to each other.
Rolling Without Slipping
A special case of connecting linear to rotational motion is "Rolling Without Slipping" (e.g., a car tire, a bowling ball).
When a circular object of radius $R$ rolls without slipping:
- The linear distance the center of mass travels equals the arc length of rotation: $\Delta x_{cm} = R \Delta \theta$
- The linear speed of the center of mass is directly linked to the angular velocity:
- The linear acceleration of the center of mass is linked to angular acceleration:
If an object slips (like a car on ice spinning its tires), $v_{cm} \neq R\omega$.
Worked Example: The Decelerating Fan
Problem: A ceiling fan with blades of radius $0.5\text{ m}$ is spinning at $40\text{ rad/s}$. It is turned off and slows down uniformly to a stop in $10\text{ s}$.
A) What is the angular acceleration of the fan?
B) How many radians did it turn while stopping?
C) What was the tangential acceleration of a bug on the tip of the blade?
Solution:
A) Angular Acceleration
Identify variables: $\omegai = 40\text{ rad/s}$, $\omegaf = 0\text{ rad/s}$, $t = 10\text{ s}$.
Using the first kinematic equation:
B) Displacement
Using the second kinematic equation:
C) Tangential Acceleration
Using the bridge equation with radius $r = 0.5\text{ m}$:
Common Mistakes & Pitfalls
Degrees vs. Radians: This is the #1 error. The formulas $v = r\omega$ and $s = r\theta$ only work if $\theta$ is in radians. If a problem gives you "revolutions per minute (RPM)" or degrees, convert immediately.
- Conversion: $1 \text{ rev} = 2\pi \text{ rad} = 360^{\circ}$.
Confusing $ac$ and $at$:
- $a_c$ (Centripetal) points toward the center. It exists if the object is moving ($v > 0$).
- $a_t$ (Tangential) points along the edge. It exists only if the object is accelerating rotationally ($ \alpha \neq 0$).
Sign Conventions: Be consistent. Usually, Counter-Clockwise is positive. If a wheel is spinning positively ($+ \omega$) but slowing down, the acceleration must be negative ($- \alpha$).
Frequency vs. Angular Velocity: Occasionally problems give frequency ($f$) in Hertz (rev/s). Remember that $\omega = 2\pi f$.