Unit 5: Rotation - Comprehensive Guide
5.1 Torque and Rotational Statics
Defining Torque
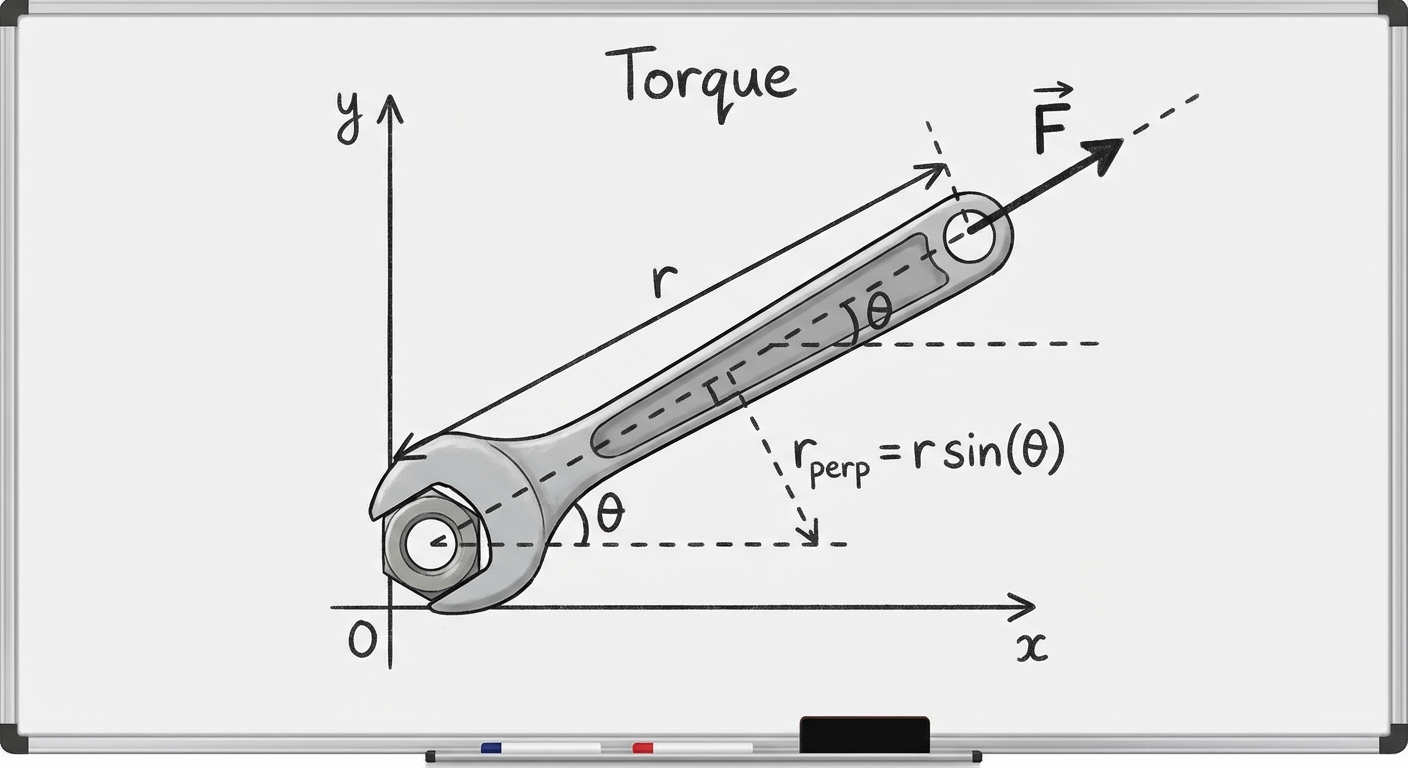
Torque ($\tau$) is the rotational equivalent of force. While force causes linear acceleration, torque causes angular acceleration. It defines how effective a force is at twisting an object around an axis.
Technically, torque is a vector quantity defined by the cross product of the position vector (from the axis or pivot to the point of force application) and the force vector.
The magnitude of torque is given by:
Where:
- $r$ is the distance from the pivot to the point of force application.
- $F$ is the magnitude of the force.
- $\theta$ is the angle between the position vector $\vec{r}$ and the force vector $\vec{F}$.
Alternatively, torque can be thought of as the force multiplied by the moment arm ($r_{\perp}$ or lever arm). The moment arm is the perpendicular distance from the axis of rotation to the "line of action" of the force.
Direction: The Right-Hand Rule
Since torque is a vector, it has direction along the axis of rotation.
- Counter-clockwise torques are generally considered positive (+).
- Clockwise torques are generally considered negative (-).
To find the vector direction: Point your fingers in the direction of $\vec{r}$, curl them toward $\vec{F}$, and your thumb points in the direction of $\vec{\tau}$ (out of the page or into the page).
Rotational Equilibrium
For a rigid body to be in static equilibrium, two conditions must be met:
- Translational Equilibrium: The net external force is zero ($\Sigma \vec{F} = 0$).
- Rotational Equilibrium: The net external torque is zero ($\Sigma \vec{\tau} = 0$) about any pivot point.
Tip: In static equilibrium problems (like a ladder leaning against a wall), you can choose your pivot point anywhere. Always choose a pivot where unknown forces act (like a hinge) to eliminate their torque from the equation ($r=0$, so $\tau=0$).
5.2 Rotational Kinematics
Variables and Analogies
Rotational motion creates a direct parallel to translational (linear) motion. All points on a rigid rotating body move through the same angle in the same amount of time.
| Linear Variable | Symbol | Rotational Variable | Symbol | Relationship to Linear |
|---|---|---|---|---|
| Displacement | $x$ | Angular Displacement | $\theta$ | $x = r\theta$ |
| Velocity | $v$ | Angular Velocity | $\omega$ | $v = r\omega$ |
| Acceleration | $a$ | Angular Acceleration | $\alpha$ | $a_t = r\alpha$ |
Note: $\theta$ must be in radians for the relationship equations to hold true.
The "Big Five" for Constant Angular Acceleration
If angular acceleration ($\alpha$) is constant, the kinematic equations are identical in form to linear kinematics.
Non-Uniform Acceleration
In AP Physics C, $\alpha$ is not always constant. You must recall the calculus definitions:
5.3 Rotational Inertia (Moment of Inertia)
Rotational Inertia ($I$), often called the Moment of Inertia, is the measure of an object's resistance to changes in its rotational motion. It is the rotational analog of mass.
Discrete Particles
For a system of distinct point masses:
Where $ri$ is the perpendicular distance of mass $mi$ from the axis of rotation.
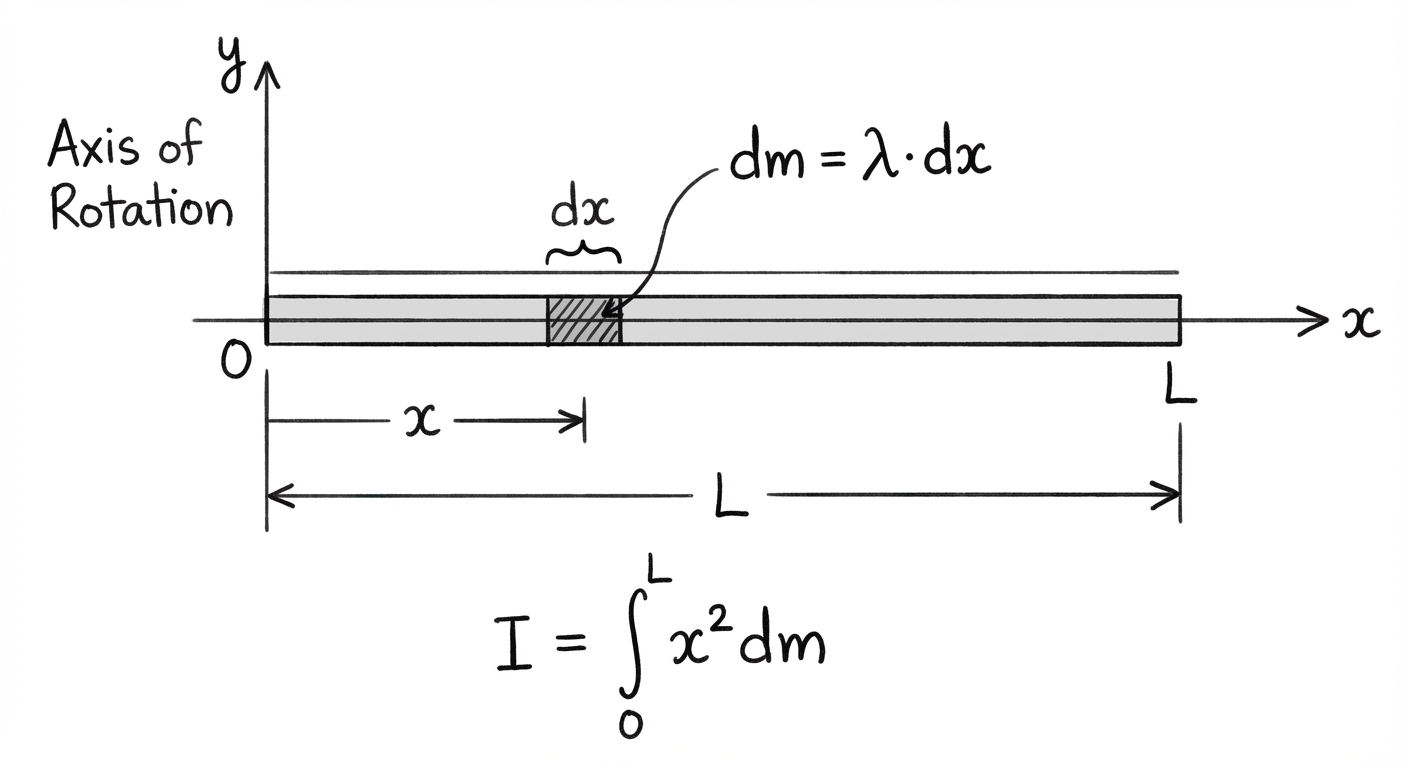
Continuous Objects (Calculus Approach)
For rigid, continuous bodies, the summation becomes an integral over the volume of the object:
To solve this, you typically express $dm$ in terms of spatial dimensions using density:
- Linear: $\lambda = \frac{M}{L} \Rightarrow dm = \lambda dr$
- Area: $\sigma = \frac{M}{A} \Rightarrow dm = \sigma dA$
- Volume: $\rho = \frac{M}{V} \Rightarrow dm = \rho dV$
Example: Thin Rod Rotated About End
Consider a rod of mass $M$ and length $L$. Density $\lambda = M/L$.
Parallel Axis Theorem
If you know the moment of inertia about the center of mass ($I_{cm}$), you can calculate the inertia about any parallel axis shift by distance $d$:
Common $I_{cm}$ values to memorize:
- Hoop/Cylindrical Shell: $MR^2$
- Solid Cylinder/Disk: $\frac{1}{2}MR^2$
- Solid Sphere: $\frac{2}{5}MR^2$
- Rod (center): $\frac{1}{12}ML^2$
5.4 Rotational Dynamics
Newton's Second Law for Rotation
Just as $F_{net} = ma$, the angular acceleration of a rigid body is proportional to the net torque and inversely proportional to the rotational inertia:
Strategy for Dynamics Problems
- Draw a Free Body Diagram (FBD) showing forces at their points of application.
- Identify the axis of rotation.
- Write $\Sigma F = ma$ for the center of mass (translational motion).
- Write $\Sigma \tau = I\alpha$ about the center of mass (rotational motion).
- Link the motions: If the object rolls without slipping or a rope unwinds without slipping, equate $a = R\alpha$.
5.5 Energy and Rolling Motion
Rotational Kinetic Energy
A rotating object possesses kinetic energy due to its motion:
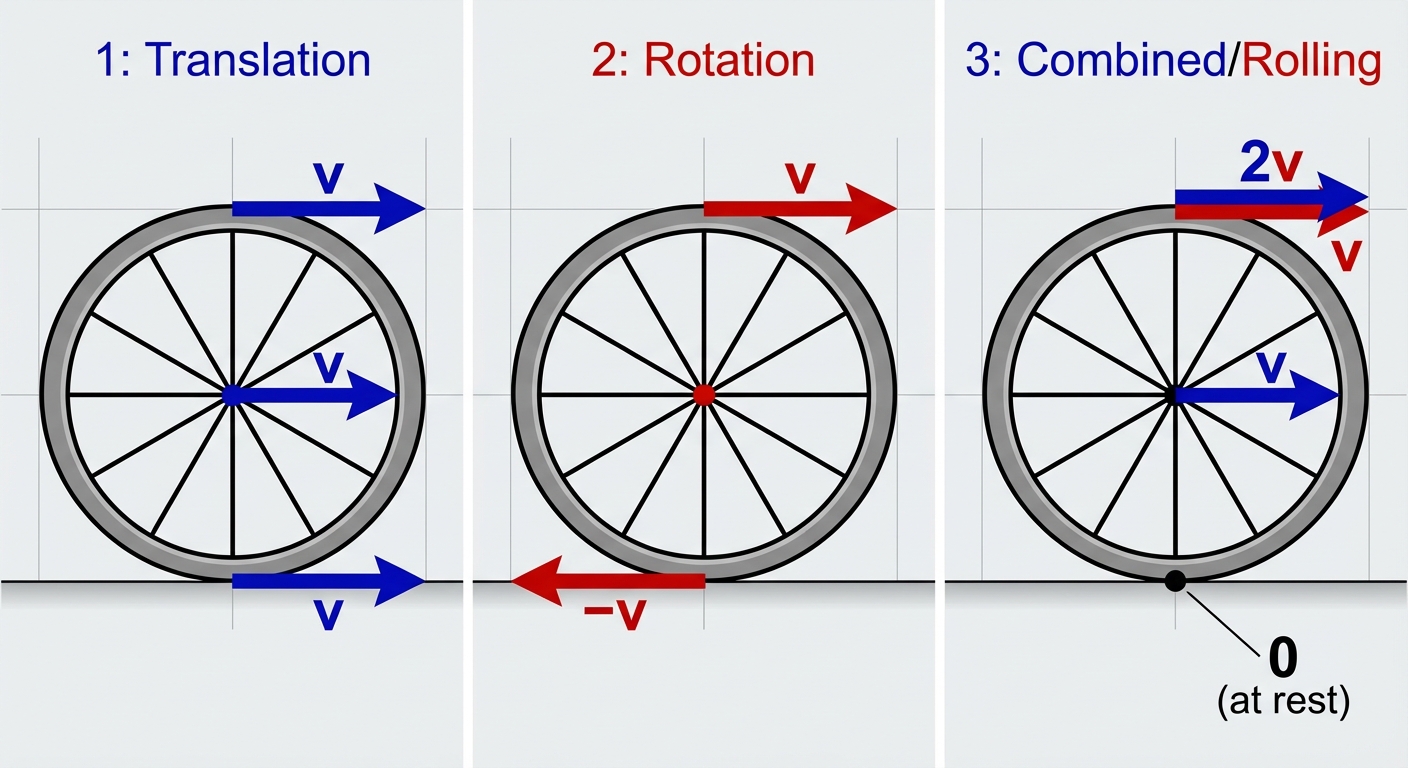
Rolling Motion (Rolling Without Slipping)
Rolling is a combination of translation of the center of mass and rotation about the center of mass.
Total Kinetic Energy:
The "No-Slip" Condition:
If an object rolls without slipping:
- $v_{cm} = R\omega$
- $a_{cm} = R\alpha$
- The point of contact with the ground has an instantaneous velocity of zero relevant to the ground.
Crucial Concept: Friction in Rolling:
Static friction is required to cause rotation (it provides the torque). However, because the contact point does not slide (distance $d=0$ at the contact patch), static friction does no work on a rolling object. Therefore, mechanical energy is conserved for an object rolling without slipping on a ramp.
5.6 Angular Momentum
Definitions
1. For a Point Particle:
Angular momentum $\vec{L}$ is defined relative to an origin.
Magnitude: $L = mvr\sin\theta = mvr_{\perp}$
2. For a Rigid Body:
For an object rotating about a fixed axis:
Conservation of Angular Momentum
The rotational analog to impulse-momentum is:
Therefore, if the net external torque on a system is zero, the total angular momentum is constant.
Classic Examples:
- Ice Skater: Arms pull in $\rightarrow$ $I$ decreases $\rightarrow$ $\omega$ increases to conserve $L$.
- Satellite: A planet in orbit moves faster at perihelion (closest approach) because $r$ decreases, so $v$ must increase to keep $L = mvr$ constant.
- Collisions: A bullet hitting a pivoted rod. Conservation of linear momentum does not apply (pivot exerts force), but conservation of angular momentum applies about the pivot point (pivot exerts no torque).
Sample Problem: The Merry-Go-Round
A child of mass $m$ runs with velocity $v$ tangent to the rim of a merry-go-round (disk of mass $M$, radius $R$) and jumps on.
Solution:
Consider the axis of rotation at the center. No external torques act about this axis.
- Initial $L$: Only the child has angular momentum. Treat child as a point particle.
- Final $L$: The child and disk rotate together.
- Conservation:
Common Mistakes & Pitfalls
- Mixing Degrees and Radians: All rotational kinematic formulas ($s=r\theta$, etc.) require radians. Never use degrees.
- Confusing $\alpha$ and $a$: Remember $a = r\alpha$ refers to the tangential acceleration. Rotating objects also have centripetal acceleration ($a_c = v^2/r = \omega^2 r$) directed inward.
- Forgeting the Axis Theorem: Students often memorize $I = \frac{1}{12}ML^2$ for a rod and try to use it when the rod rotates around its end. You must use the Parallel Axis Theorem ($I_{end} = \frac{1}{3}ML^2$).
- Conservation of Momentum Confusion: In collision problems involving rotation (like a clay ball hitting a hanging stick), Linear Momentum is usually NOT conserved (due to the hinge force), considering the system of ball+stick. Only Angular Momentum is conserved about the hinge.
- Torque vs. Force: A net force of zero does not mean net torque is zero (and vice versa). A "force couple" (two equal opposite forces separated by distance) creates torque but zero net force.