AP Physics 1: Complete Guide to Periodic Motion and SHM
Fundamentals of Simple Harmonic Motion (SHM)
Defining Simple Harmonic Motion
Oscillatory motion, or periodic motion, describes an object that repeats its path at regular time intervals. However, not all periodic motion is Simple Harmonic Motion (SHM). For an object to undergo SHM, it must satisfy a specific dynamic condition:
The Restoring Force Condition:
For SHM to occur, the net restoring force must be:
- Proportional to the displacement ($x$) from the equilibrium position.
- Opposite in direction to the displacement (indicated by the negative sign).
If the restoring force is constant (like kinetic friction) or depends on $x^3$, the motion may be periodic, but it is not SHM.
Key Variables and Notation
| Term | Symbol | Definition | Unit |
|---|---|---|---|
| Period | $T$ | The time it takes to complete one full cycle/oscillation. | Seconds ($s$) |
| Frequency | $f$ | The number of cycles completed per second. | Hertz ($Hz$) |
| Amplitude | $A$ | The maximum displacement from equilibrium. | Meters ($m$) |
| Displacement | $x$ | Position relative to the equilibrium point ($x=0$). | Meters ($m$) |
| Angular Frequency | $\omega$ | A measure of rotation rate or oscillation speed ($2\pi f$). | Rad/sec ($rad/s$) |
Period vs. Frequency
Period and frequency are inversely related. If you know one, you automatically know the other.
Kinematics of SHM
Unlike linear kinematics with constant acceleration, acceleration in SHM is constantly changing because the force varies with position ($F \propto x$). Therefore, you cannot use the "Big Five" kinematic equations ($v = v_0 + at$, etc.). Instead, we analyze the position, velocity, and acceleration as functions of time.
Graphical Analysis
The position of an object in SHM over time forms a sinusoidal wave (sine or cosine).
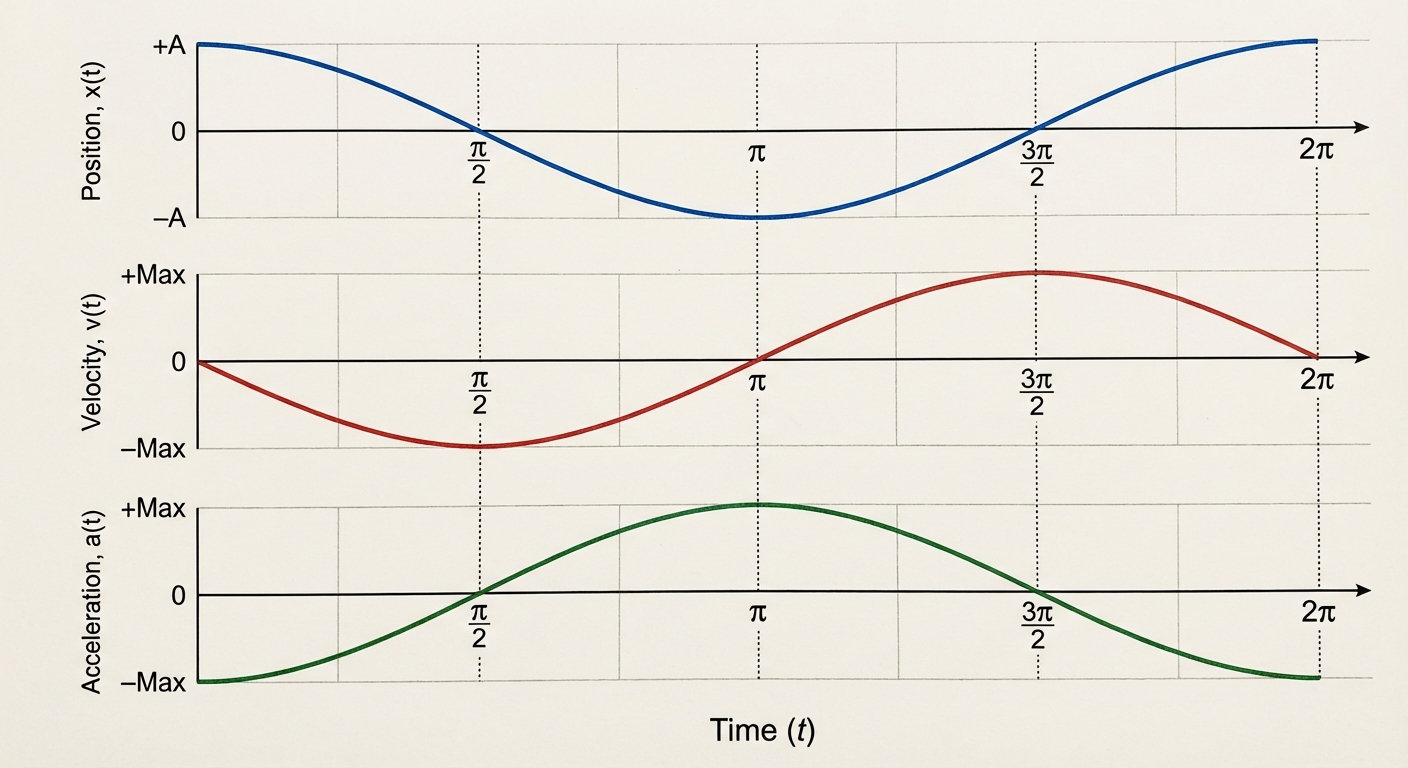
- Position ($x$): Oscillates between $+A$ and $-A$. At maximum displacement (amplitude), speed is zero.
- Velocity ($v$): Is the slope of the position graph. Velocity is maximum at the equilibrium position ($x=0$) and zero at the turning points ($x = \pm A$).
- Acceleration ($a$): Is the slope of the velocity graph. By Newton's Second Law ($F=ma$), acceleration is proportional to force. Since $F \propto -x$, acceleration is greatest when displacement is greatest.
Maxima Summary Table
| Position | Displacement ($x$) | Restoring Force ($F$) | Acceleration ($a$) | Velocity ($v$) | Kinetic Energy ($K$) | Potential Energy ($U$) |
|---|---|---|---|---|---|---|
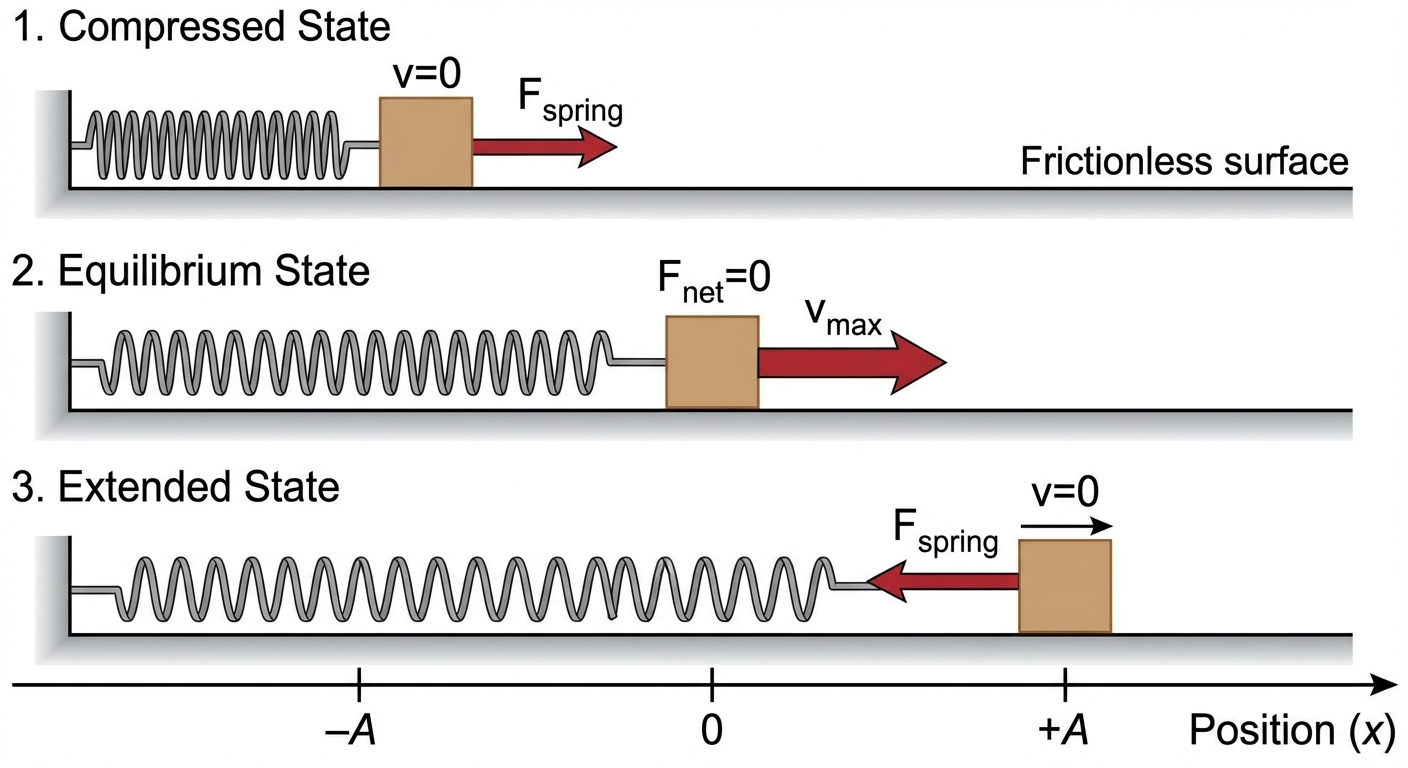
| Equilibrium | $0$ | $0$ | $0$ | $v_{max}$ | $Max$ | $0$ |
| Amplitude | $\pm A$ | $F_{max}$ | $a_{max}$ | $0$ | $0$ | $Max$ |
Mass-Spring Systems
A classic example of SHM is a block of mass $m$ attached to a spring with spring constant $k$ (measure of stiffness).
The Period of a Spring
The period of a mass-spring system depends on inertial properties (mass) and restoring properties (spring stiffness).
Crucial Observation: The period $T$ is independent of the Amplitude ($A$). Whether you pull the spring back 1 cm or 10 cm, it takes the same amount of time to complete one cycle (assuming the spring doesn't permanently deform).
- Higher Mass ($m$): More inertia $\rightarrow$ harder to accelerate $\rightarrow$ Period increases (slower).
- Stiffer Spring ($k$): Stronger force $\rightarrow$ accelerates faster $\rightarrow$ Period decreases (faster).
Vertical Springs
When a spring hangs vertically, gravity stretches it to a new equilibrium position.
- The equilibrium position shifts downward by $\Delta x = mg/k$.
- However, the period equation remains the same. Gravity adds a constant force, which shifts the center of oscillation but does not change the frequency.
The Simple Pendulum
A simple pendulum consists of a bob of mass $m$ attached to a string of length $L$.
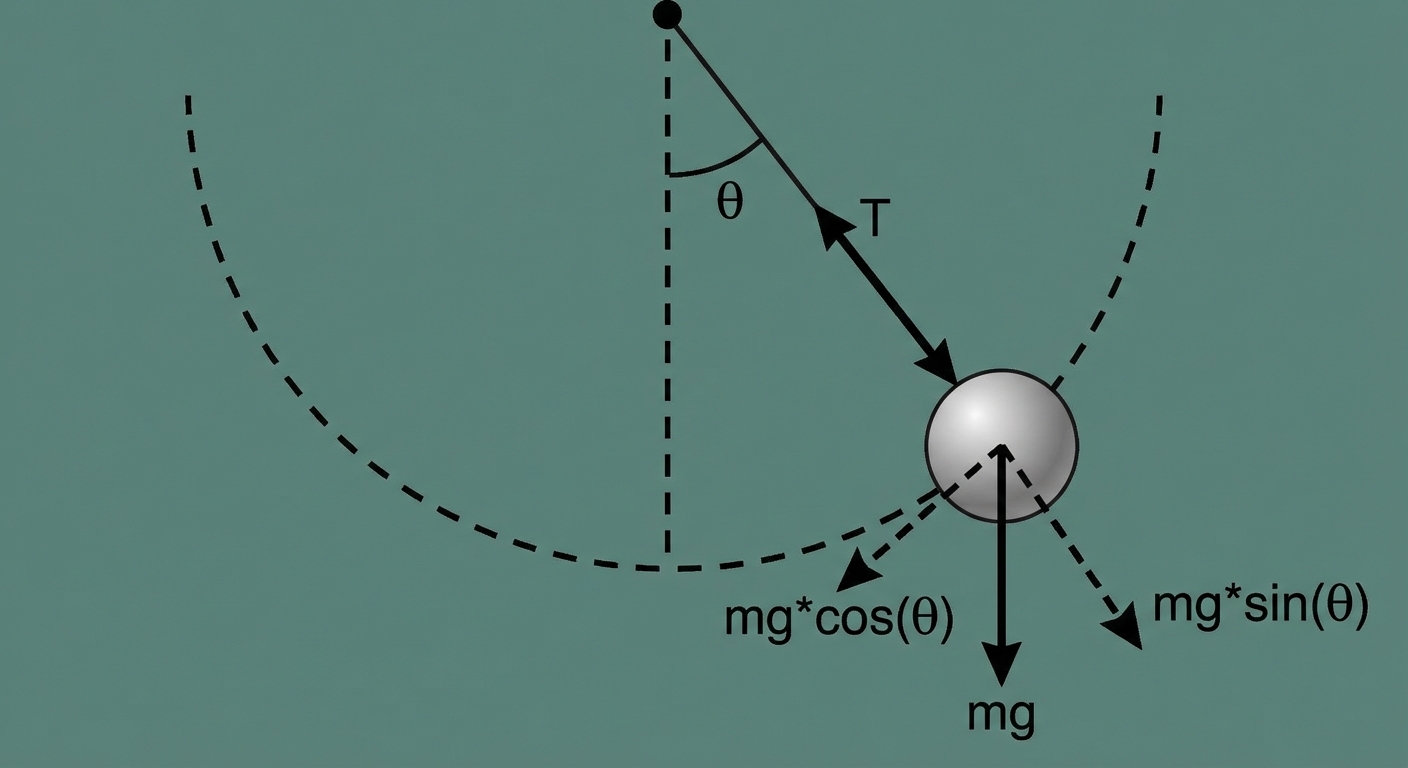
The Restoring Force
The restoring force is the component of gravity acting tangent to the arc of motion.
For small angles (typically $\theta < 15^\circ$), we use the Small Angle Approximation where $\sin\theta \approx \theta$ (in radians). This linearizes the force, allowing the pendulum to approximate SHM.
The Period of a Pendulum
Crucial Observations:
- Mass Independence: The period does not depend on the mass of the bob. Heavy and light pendulums swing at the same rate (just like heavy and light objects fall at the same rate in vacuum).
- Amplitude Independence: For small angles, amplitude does not affect the period.
- Length ($L$): Comparison is linear to the square root. To double the period, you must quadruple the length.
Energy in Simple Harmonic Motion
Assuming no friction or air resistance, the Total Mechanical Energy ($E_T$) of an oscillator is conserved.
Energy Definitions
- Potential Energy ($Us$): Stored in the spring (or gravitational field for pendulums).
- Kinetic Energy ($K$): Energy of motion.
- Total Energy: Can be calculated using the maximums.
The Energy Well
Graphing Energy vs. Position creates a parabolic "energy well."
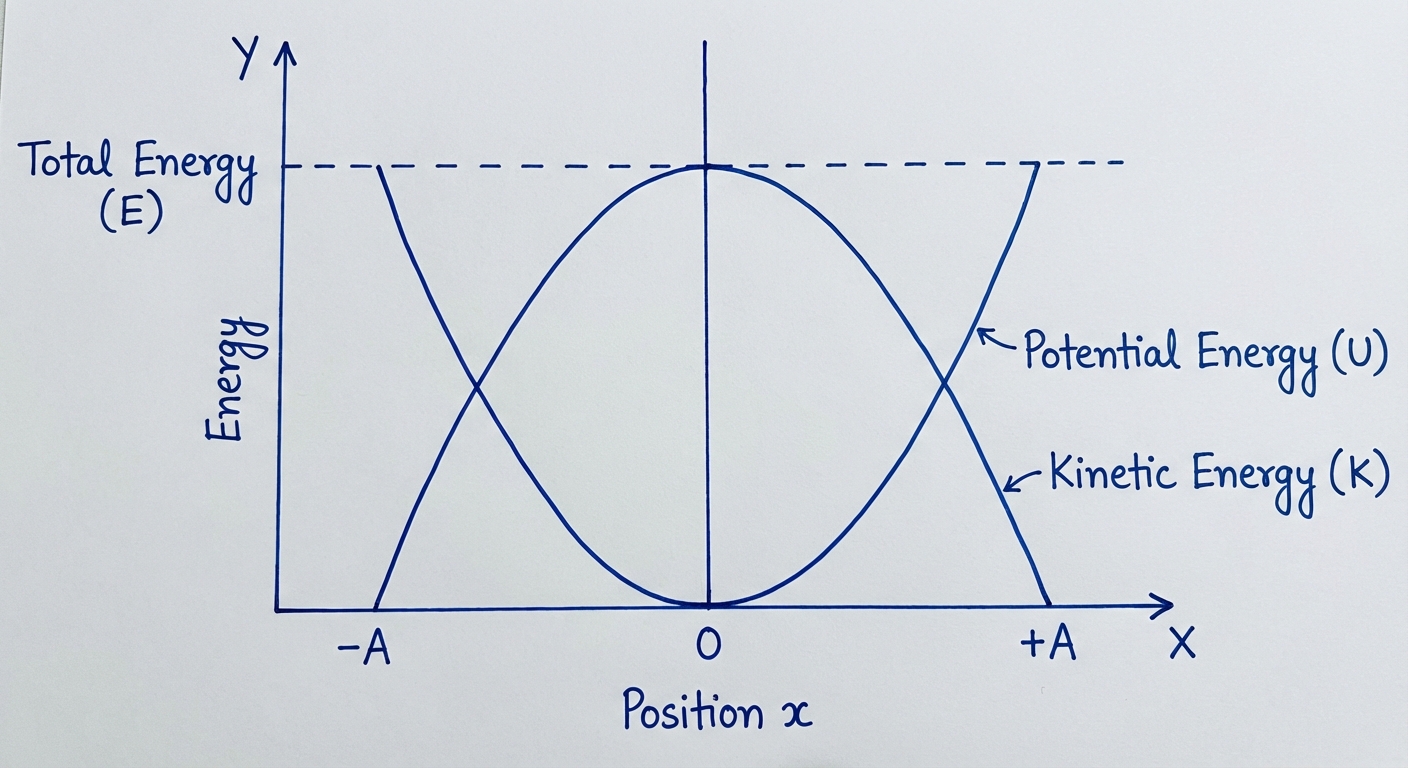
- At $x = \pm A$ (endpoints): $K=0$, energy is all Potential.
- At $x = 0$ (equilibrium): $U=0$, energy is all Kinetic.
- At any point in between: $E_T$ is a mix of $K$ and $U$.
Common Mistakes & Pitfalls
Confusing Acceleration and Velocity:
- Mistake: Thinking that when velocity is zero, acceleration must be zero.
- Correction: At the turning points (Amplitude), velocity is zero (instantaneously stopped), but acceleration is maximum because the spring is stretched the most.
Frequency vs. Period:
- Mistake: Mixing up the formulas $T$ and $f$, or forgetting to invert the value ($2$ Hz is equivalent to $0.5$ s).
- Mnemonic: Frequency is (F)ast (cycles per second). T (Period) is Time.
Pendulum Mass Confusion:
- Mistake: Thinking a heavier pendulum bob swings faster.
- Correction: Look at the formula $T = 2\pi\sqrt{L/g}$. Is there an $m$ in there? No. Mass cancels out.
Kinematic Equations Trap:
- Mistake: Using $x = vt$ or $v^2 = v_0^2 + 2ax$.
- Correction: These equations only work for constant acceleration. SHM has variable acceleration. Use energy conservation or proportional reasoning instead.
Amplitude and Period:
- Mistake: Thinking that pulling a spring back further makes the period longer because it has "farther to travel."
- Correction: In ideal SHM, amplitude has no effect on period. While it has farther to travel, the restoring force is stronger, producing a larger acceleration that perfectly compensates for the extra distance.