AP Physics 1: Rotational Dynamics & Newton's Laws
Unit 5: Torque and Rotational Dynamics
In previous units, you studied translational motion—objects moving from point A to point B. Now, we shift our focus to rotational motion—objects spinning around an axis. Just as forces cause linear acceleration, torques cause angular acceleration. This section translates Newton's familiar laws of motion into the language of rotation.
Rotational Equilibrium and Newton's First Law
The Concept of Equilibrium
Newton's First Law in linear physics states that an object maintains a constant velocity (or remains at rest) unless acted upon by a net external force. In the rotational world, the concept is parallel but focuses on angular velocity ().
Rotational Equilibrium occurs when the net torque acting on a system is zero. This implies that the angular acceleration () is zero, and the object is either not rotating or rotating at a constant angular velocity.
For an extended rigid body to be in Complete Static Equilibrium, two conditions must be met simultaneously:
- Translational Equilibrium: The net force is zero.
- Rotational Equilibrium: The net torque is zero.
Choosing an Axis of Rotation
A critical skill in AP Physics 1 is realizing that if an object is in static equilibrium (not moving at all), the net torque must be zero about any pivot point you choose.
- Strategy: Choose a pivot point where an unknown force acts. Because torque is , if , the torque from that unknown force becomes zero. This eliminates that variable from your equation, making the algebra much easier.
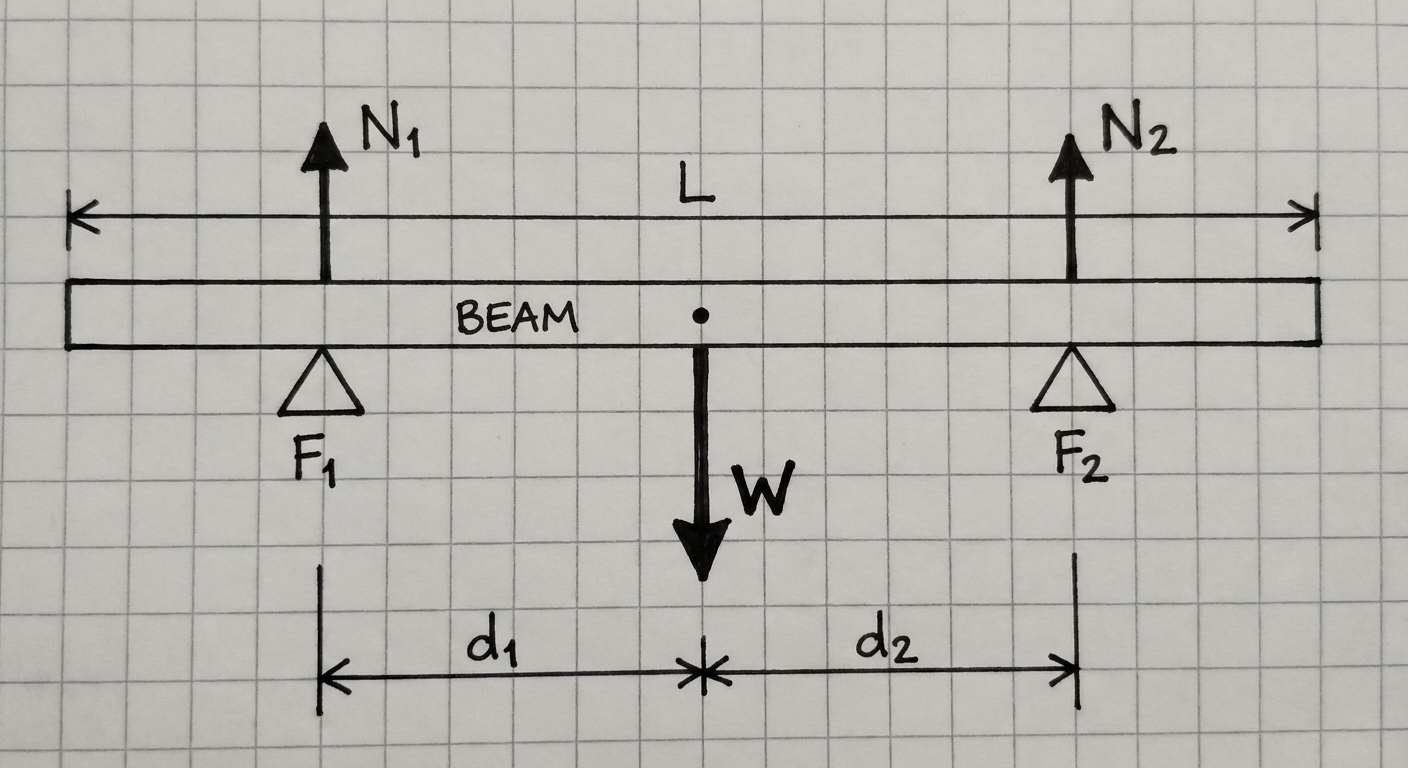
Worked Example: The Seesaw
Scenario: A 3.0 m long uniform board of mass 10 kg sits on a fulcrum exactly in the middle. Alice (50 kg) sits on the far left end. Where must Bob (70 kg) sit for the seesaw to be in balance?
Step 1: Identify Forces and Pivot.
- Pivot: The fulcrum (center).
- Forces: Gravity on Alice (), Gravity on Bob (), Gravity on Board (), Normal force from fulcrum ().
- Note: Since the board is uniform and pivoted at the center, the torque from the board's own weight is zero ().
Step 2: Apply Rotational Equilibrium Condition.
We define Counter-Clockwise (CCW) as positive.
Step 3: Solve.
The cancels out.
Bob must sit 1.07 m from the fulcrum on the right side.
Newton's Second Law in Rotational Form
This is the core of rotational dynamics. Just as describes how resistance to motion (mass) interacts with force to create acceleration, the rotational version relates torque, rotational inertia, and angular acceleration.
The Fundamental Equation
- : The Net Torque (in ). This is the vector sum of all torques acting on the object.
- : The Moment of Inertia (in ). This represents the object's resistance to changes in rotational motion.
- : The Angular Acceleration (in ).
Understanding Moment of Inertia ()
Unlike mass (), which is constant for an object regardless of how you push it, Moment of Inertia () depends on how the mass is distributed relative to the axis of rotation.
- General Rule: The farther the mass is distributed from the axis of rotation, the larger is, and the harder it is to rotate.
- For a point mass at distance from the axis: .
- For rigid bodies (cylinders, spheres, rods), specific geometric formulas exist (e.g., for a solid cylinder), but AP Physics 1 questions often focus on qualitative comparisons or provide the necessary formula.
Linear vs. Rotational Analogy Table
Use this table to translate your knowledge of linear dynamics to rotational dynamics.
| Concept | Linear (Translational) | Rotational |
|---|---|---|
| Displacement | (meters) | (radians) |
| Velocity | (m/s) | (rad/s) |
| Acceleration | (m/s) | (rad/s) |
| Inertia | (Mass - kg) | (Moment of Inertia - kg·m) |
| Cause of Motion | (Force - N) | (Torque - N·m) |
| Newton's 2nd Law |
Example: The Massive Pulley
Consider a string wrapped around a solid disk shaped pulley (mass , radius ). A block of mass hangs from the string. If the system is released, what is the acceleration of the block? (Note: The pulley is not massless).
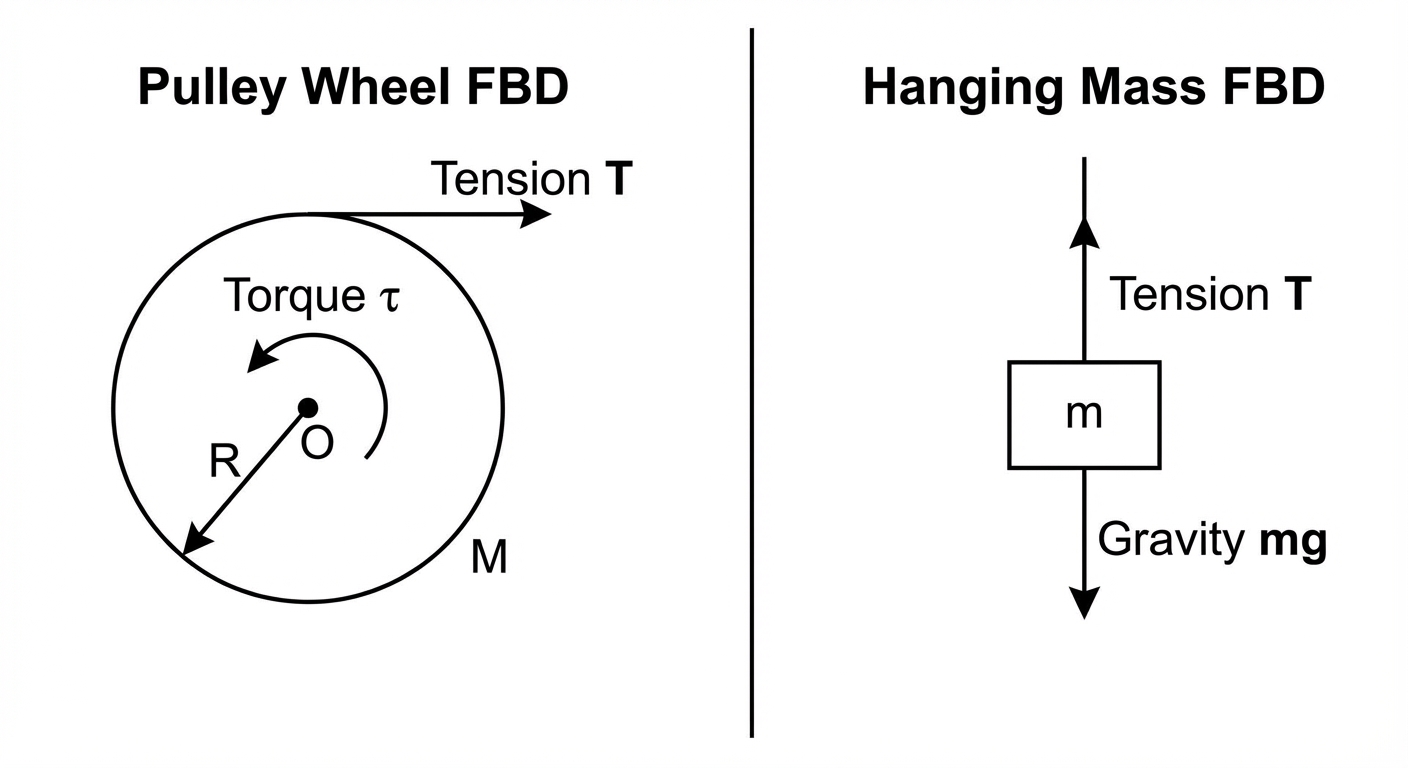
Step 1: Analyze the Hanging Mass (Linear Motion).
- Forces: Tension () up, Gravity () down.
- Newton's 2nd Law:
- Equation 1:
Step 2: Analyze the Pulley (Rotational Motion).
- Forces: Tension () acts at the rim (radius ). The axle forces exert no torque ().
- Newton's 2nd Law (Rotational):
- Torque from Tension:
- Equation 2:
Step 3: Link Linear and Angular Variables.
- Since the string unwinds without slipping: or .
Step 4: Combine and Solve.
Substitute into Equation 2:
Substitute into Equation 1:
Concept Check: Notice that the acceleration is less than . Part of the potential energy is going into rotating the massive pulley rather than just accelerating the block downward.
Rolling Motion and Constraints
A common application of these laws is objects rolling down an incline.
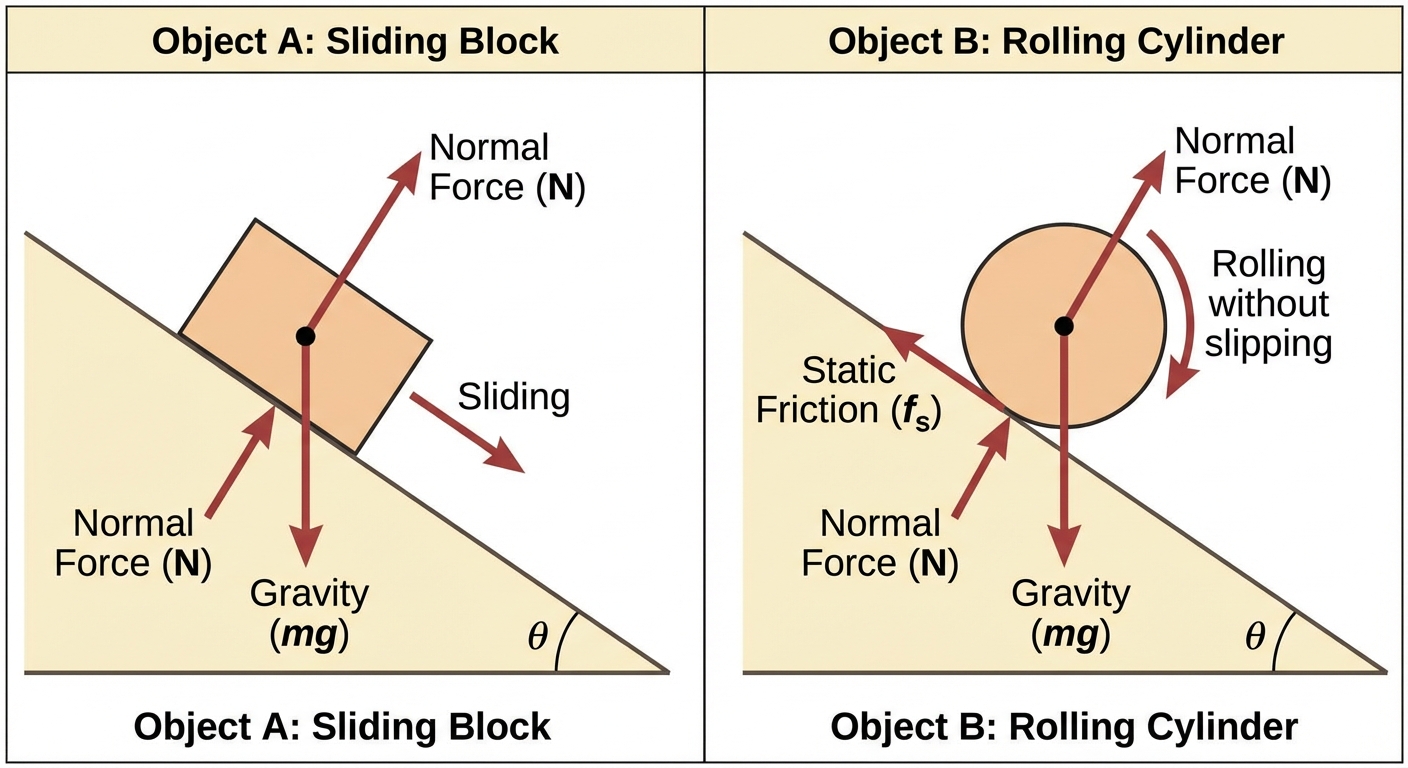
Why Friction is Necessary for Rolling
If you place a ball on a frictionless ramp, it will slide down without spinning () because there is no torque. Gravity acts at the Center of Mass (CM), so its lever arm is zero relative to the CM.
For an object to roll, static friction must act at the point of contact. This friction provides the torque needed to rotate the object ().
Ranking Rolling Objects
If a hoop, a solid cylinder, and a solid sphere (all same mass and radius) race down a ramp, which wins?
- Look at Inertia: I{hoop} > I{cylinder} > I_{sphere}
- Hoop (): Mass is far from the center. Hardest to rotate.
- Sphere (): Mass is very concentrated near the center. Easiest to rotate.
- Apply Newton's 2nd Law:
The object with the lowest rotational inertia () resists rotation the least. Therefore, it acquires angular velocity faster and converts potential energy into kinetic energy more efficiently for linear speed. - Result: The sphere arrives first. The hoop arrives last.
Common Mistakes & Pitfalls
1. Confusing Forces and Torques
- Mistake: Thinking that if the net force is zero, the net torque must be zero (or vice versa).
- Correction: A couple (two equal and opposite forces acting at different points) has zero net force but non-zero net torque. Always check both conditions separately.
2. Forgetting the Axis of Rotation
- Mistake: Calculating torque without defining a pivot point, or mixing pivot points in the same equation.
- Correction: Clearly mark your pivot point on your diagram. All lever arms () are measured from that specific point.
3. Mixing Linear and Rotational Variables Improperly
- Mistake: Using linear mass in instead of , or forgetting the radius when converting to force.
- Correction: Always check units. Torque is . results in units of . Consistency is key.
4. Ignoring the Sign Convention
- Mistake: Adding clockwise and counter-clockwise torques together without signs.
- Correction: Pick a standard convention (usually CCW is positive, CW is negative) and stick to it rigidly throughout the algebra.
5. Friction Direction in Rolling
- Mistake: Drawing kinetic friction opposite to motion for a rolling wheel.
- Correction: Rolling without slipping uses static friction. For a wheel accelerating (like a car tire), friction points forward. For a wheel rolling passively down a ramp, friction acts up the ramp (opposing the tendency of the contact point to slide down).