Comprehensive Guide to Mechanics Unit 6: Oscillations
6.1 Fundamentals of Simple Harmonic Motion (SHM)
Defining SHM
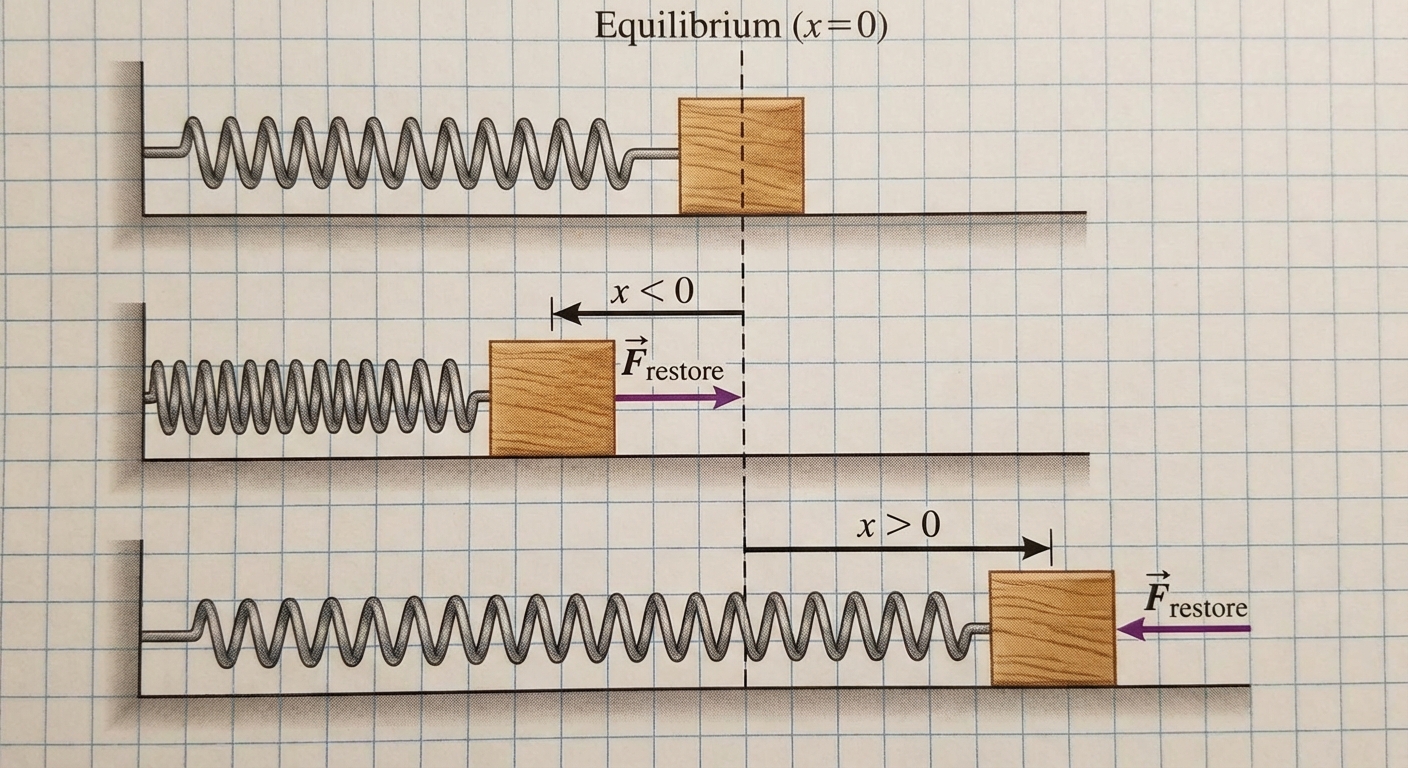
Simple Harmonic Motion (SHM) is a specific type of periodic motion where the restoring force is directly proportional to the displacement from equilibrium and acts in the direction opposite to that displacement.
For a system to undergo SHM, it must satisfy the following condition, known as Hooke’s Law:
Where:
- $F_{restoring}$ is the force pulling the system back to equilibrium.
- $k$ is a constant of proportionality (e.g., spring constant), representing stiffness.
- $x$ is the displacement from the equilibrium position.
- The negative sign indicates the force opposes the displacement.
The Differential Equation of SHM
In AP Physics C, you must be able to derive the equation of motion using Newton's Second Law ($F_{net} = ma$). Substituting Hooke’s Law into Newton’s law yields a second-order linear differential equation:
Rearranging this gives the standard differential form of SHM:
This equation tells us that the acceleration $a(t)$ is proportional to the negative of the position $x(t)$.
Key Variables
- Amplitude ($A$): The maximum displacement from equilibrium (always positive).
- Period ($T$): The time taken to complete one full cycle (seconds).
- Frequency ($f$): The number of cycles per unit time (Hertz, Hz). $f = 1/T$.
- Angular Frequency ($\omega$): A measure of oscillation rate in radians per second. $\omega = 2\pi f = \frac{2\pi}{T}$.
6.2 Dynamics of the Spring-Block Oscillator
Horizontal Motion
For a block of mass $m$ attached to a spring of constant $k$ on a frictionless surface, the angular frequency is derived from the differential equation term $\frac{k}{m}$:
Using the relationship $T = \frac{2\pi}{\omega}$, we find the period:
- Note: A stiffer spring ($k \uparrow$) creates a faster oscillation ($T \downarrow$). A heavier mass ($m \uparrow$) creates a slower oscillation ($T \uparrow$).
Vertical Motion
A vertical spring works identically to a horizontal one, but the equilibrium position is shifted by gravity.
- Unstretched Position: The spring hangs loosely.
- Equilibrium Position ($y_{eq}$): The mass hangs at rest. Here, the spring force equals gravity: $k \Delta L = mg$.
- Oscillation: The block oscillates around this new equilibrium point $y_{eq}$.
Crucial Concept: Gravity does not change the period $T$ or frequency $f$ of the spring; it only shifts the center point of the oscillation.
Sample Problem: Vertical Spring
Problem: A block of mass $m = 1.5 \text{ kg}$ is attached to a vertical spring ($k = 300 \text{ N/m}$). It is pulled down $2.0 \text{ cm}$ from equilibrium and released.
(a) Find the frequency.
(b) Determine the maximum spring stretch from its natural length.
Solution:
(a) Frequency depends only on $k$ and $m$:
(b) First, find the initial stretch at equilibrium ($d$) using $kd = mg$:
The amplitude of oscillation is given as $A = 2.0 \text{ cm}$.
- Max Stretch: Occurs at the lowest point: $d + A = 4.9 + 2.0 = 6.9 \text{ cm}$.
- Min Stretch: Occurs at the highest point: $d - A = 4.9 - 2.0 = 2.9 \text{ cm}$.
6.3 Kinematics: The Sinusoidal Description
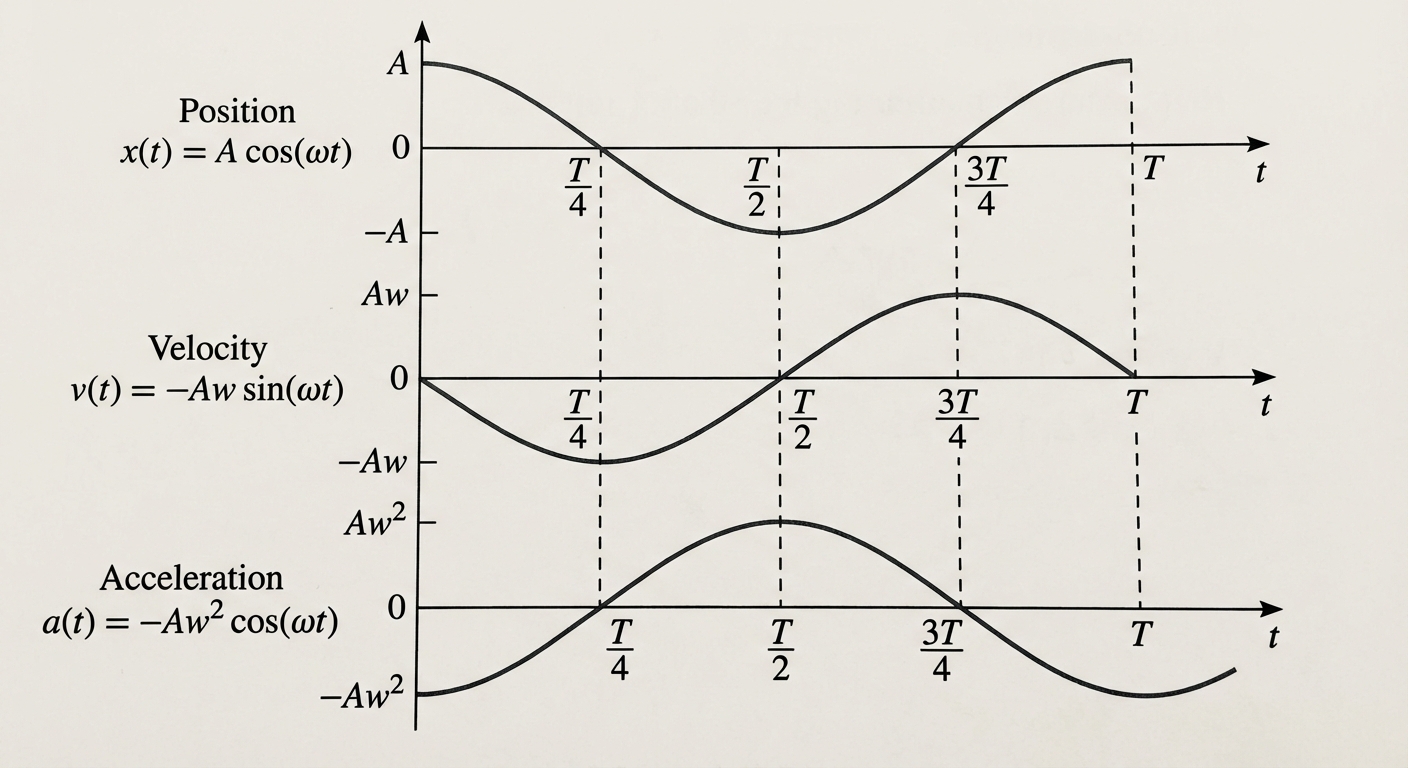
Because the acceleration is proportional to the position ($a \propto -x$), the solution to the differential equation is a sinusoidal function.
Position ($x$)
- Here, we utilize cosine, though sine is also valid depending on the phase constant (${phi}$).
- $\phi$ shifts the graph left or right to match the initial conditions at $t=0$.
- If released from max positive extension at $t=0$: use cosine (or $\phi=0$).
- If passing through equilibrium moving positively at $t=0$: use sine (or $\phi=-\pi/2$).
Velocity ($v$) & Acceleration ($a$)
Using calculus derivatives ($v = \frac{dx}{dt}$ and $a = \frac{dv}{dt}$):
Notice that if we substitute $x(t)$ back into the acceleration equation, we confirm $a(t) = -\omega^2 x(t)$, which satisfies the definition of SHM.
Maximum Values
Since sine and cosine oscillate between -1 and 1:
- $v_{max} = A\omega$
- $a_{max} = A\omega^2$
Sample Problem: Kinematics
Problem: An oscillator has $x(t) = (0.5\text{ m}) \cos(4t)$. Find the position and velocity at $t = 0.2\text{ s}$. Note: $\omega = 4 \text{ rad/s}$.
Solution:
1. Position:
Calculator in Radians! $\cos(0.8) \approx 0.697$
2. Velocity:
First, derive the velocity function: $v(t) = -0.5(4)\sin(4t) = -2\sin(4t)$.
6.4 Energy in Simple Harmonic Motion
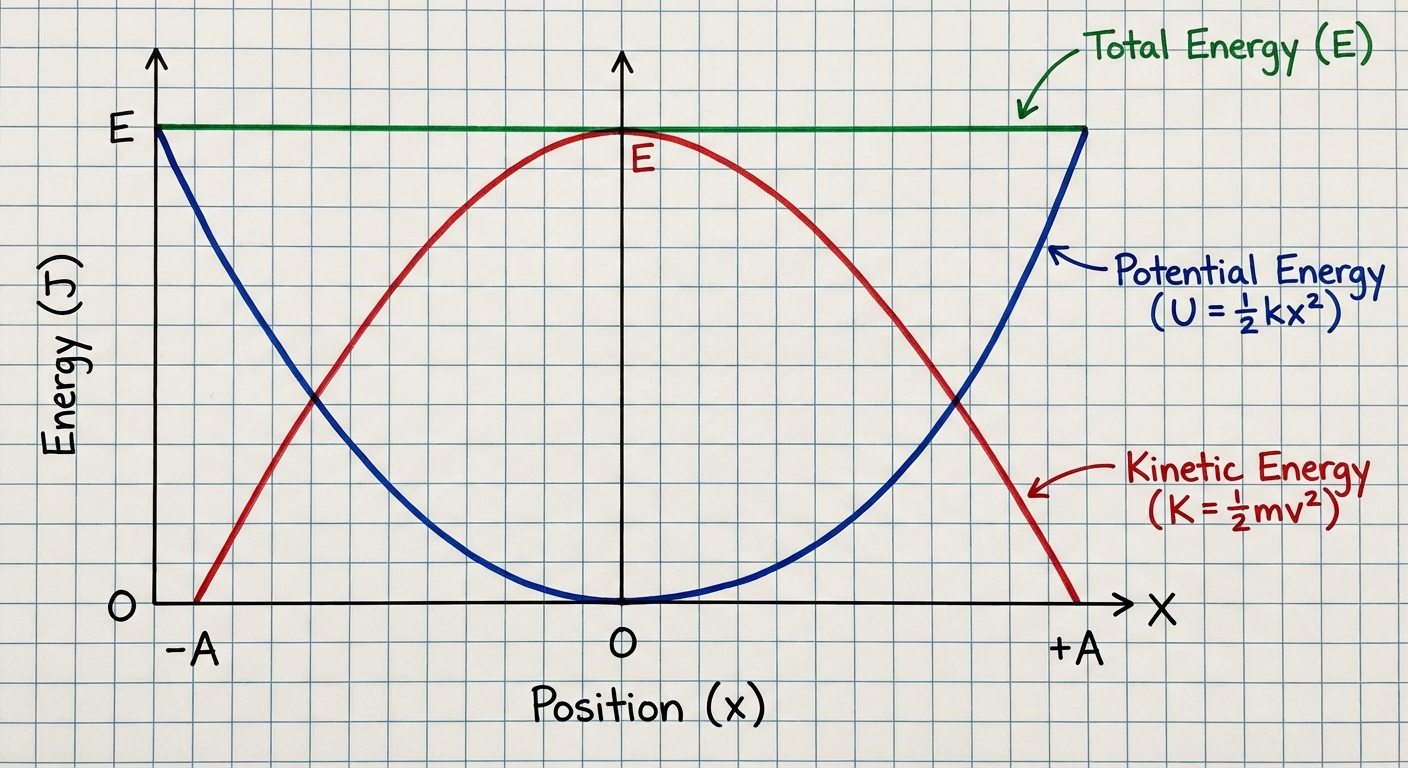
In an ideal SHM system (no friction/damping), Mechanical Energy ($E$) is conserved. Energy continuously transforms between Kinetic Energy ($K$) and Elastic Potential Energy ($U_s$).
Formulas
- Potential Energy: $U_s = \frac{1}{2}kx^2$
- Kinetic Energy: $K = \frac{1}{2}mv^2$
- Total Energy: Constant at any point.
At the amplitude boundaries ($x = \pm A$), velocity is zero, so all energy is potential:
At the equilibrium ($x = 0$), potential energy is zero, so all energy is kinetic:
Energy Relationships
Since total energy is conserved:
Solving for $v{max}$ yields $v{max} = \sqrt{\frac{k}{m}}A$, which matches our kinematic derivation ($v{max} = \omega A$).
6.5 Pendulums
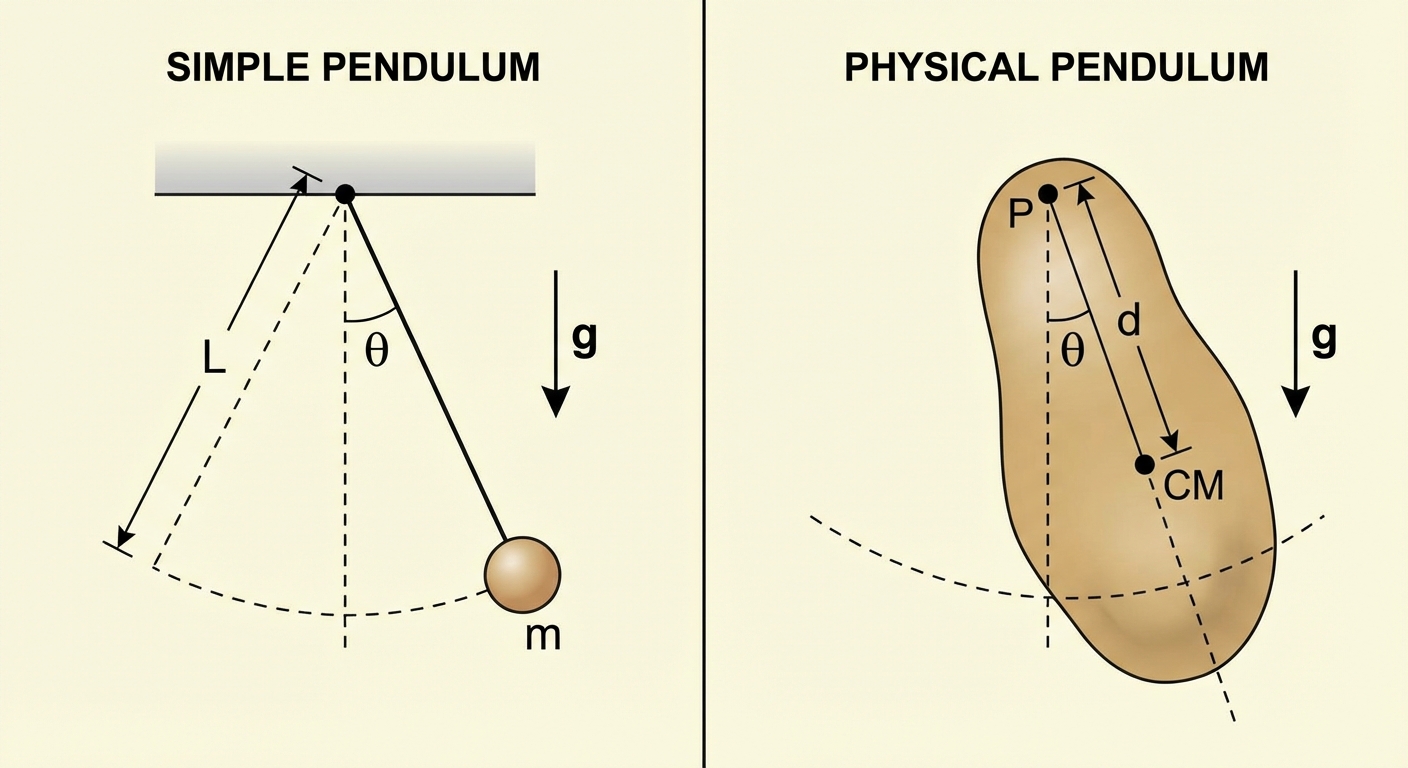
1. The Simple Pendulum
A point mass $m$ on a string of length $L$. The restoring force is gravity acting tangentially: $F_t = -mg \sin\theta$.
Small Angle Approximation:
For oscillations where $\theta < 10^\circ$ (approx 0.2 radians), $\sin\theta \approx \theta$. This linearizes the restoring force, making it SHM.
- Note: The period is independent of the mass of the bob.
2. The Physical Pendulum (Rigid Body)
AP Physics C Exclusive Topic.
Any rigid body pivoted at a point other than its center of mass (COM) can oscillate. We use the rotational form of Newton's Second Law: $\tau = I\alpha$.
- Restoring Torque: $\tau = -mgd \sin\theta \approx -mgd\theta$
- $d$ represents the distance from the pivot point to the Center of Mass.
- Moment of Inertia ($I$): The rotational inertia of the body about the pivot point. Use the Parallel Axis Theorem ($I = I_{cm} + md^2$) if necessary.
Comparing $\tau = I\alpha$ to SHM:
From this, $\omega = \sqrt{\frac{mgd}{I}}$, yielding the period:
3. Torsional Pendulum
A disk or object suspended by a wire that twists. The wire exerts a restoring torque $\tau = -\kappa \theta$, where $\kappa$ is the torsion constant.
Sample Problem: Physical Pendulum
Problem: A uniform meter stick (mass $m$, length $L=1\text{ m}$) is pivoted at the 20 cm mark. Calculate the period of small oscillations ($g=9.8 \text{ m/s}^2$).
Solution:
- Identify $d$: COM is at 50 cm. Pivot is at 20 cm. Distance $d = |0.5 - 0.2| = 0.3 \text{ m}$.
- Calculate $I$:
- $I_{cm} = \frac{1}{12}mL^2$
- Using Parallel Axis Theorem: $I{pivot} = I{cm} + md^2 = \frac{1}{12}mL^2 + m(0.3L)^2$.
- $I_{pivot} = m(\frac{1}{12} + 0.09)L^2 = m(0.0833 + 0.09)L^2 = 0.1733 mL^2$.
- Apply Formula:
Mass $m$ cancels out.
6.6 Summary of Period Formulas
| System | Period ($T$) | Angular Frequency ($\omega$) | Key Constant |
|---|---|---|---|
| Spring-Block | $2\pi\sqrt{\frac{m}{k}}$ | $\sqrt{\frac{k}{m}}$ | $k$ (Spring Constant) |
| Simple Pendulum | $2\pi\sqrt{\frac{L}{g}}$ | $\sqrt{\frac{g}{L}}$ | $L$ (Length) |
| Physical Pendulum | $2\pi\sqrt{\frac{I}{mgd}}$ | $\sqrt{\frac{mgd}{I}}$ | $I$ (Inertia), $d$ (pivot-COM dist) |
| Torsional Pendulum | $2\pi\sqrt{\frac{I}{\kappa}}$ | $\sqrt{\frac{\kappa}{I}}$ | $\kappa$ (Torsion Constant) |
Memory Aid:
- Spring: "Tim is making money" ($2\pi\sqrt{m/k}$)
- Pendulum: "Tim has Low gas" ($2\pi\sqrt{L/g}$)
6.7 Common Mistakes & Pitfalls
- Calculator Mode: Always use RADIANS when calculating trig functions involving time ($t$). Degrees are only for geometry. If you see $\pi$ inside the sine/cosine argument, use Radians.
- Confusing $L$ and $d$: In the Physical Pendulum, $d$ is NOT the length of the object. It is the distance from the pivot to the Center of Mass.
- The Negative Sign: Students often drop the negative sign in $F = -kx$. In force analysis, this sign is crucial because it defines the restoring nature. Without it, the solution is exponential growth, not oscillation.
- Derivatives: Remember the Chain Rule! When differentiating $\cos(\omega t)$, the $\omega$ must come out.
- $x = A\cos(\omega t)$
- $v = -A\mathbf{\omega}\sin(\omega t)$
- $a = -A\mathbf{\omega^2}\cos(\omega t)$
- Frequency vs. Angular Frequency:
- $f$ is in Hz (cycles/sec).
- $\omega$ is in rad/s.
- Don't mix them up in equations. $a = -\omega^2 x$, NOT $-f^2 x$.