Comprehensive Guide to Unit 6: Rotational Energy and Momentum
Rotational Kinetic Energy
Just as objects moving in a straight line possess translational kinetic energy, objects rotating about an axis possess Rotational Kinetic Energy. In AP Physics 1, understanding the distribution of mass (Rotational Inertia) is critical to mastering this concept. Energy is a scalar quantity, meaning it has no direction, only magnitude.
Defining the Formula
We can draw a direct analogy between linear and rotational motion. If translational kinetic energy depends on mass and velocity, rotational kinetic energy differs only by substituting the rotational equivalents:
- Mass ($m$) $\rightarrow$ Rotational Inertia ($I$)
- Velocity ($v$) $\rightarrow$ Angular Velocity ($\omega$)
The formula for the kinetic energy of a generic rotating rigid body is:
Where:
- $K_{rot}$ is Rotational Kinetic Energy (Joules, J)
- $I$ is Rotational Inertia (kg$\cdot$m$^2$)
- $\omega$ is Angular Velocity (radians/s)
Total Mechanical Energy in Rolling Motion
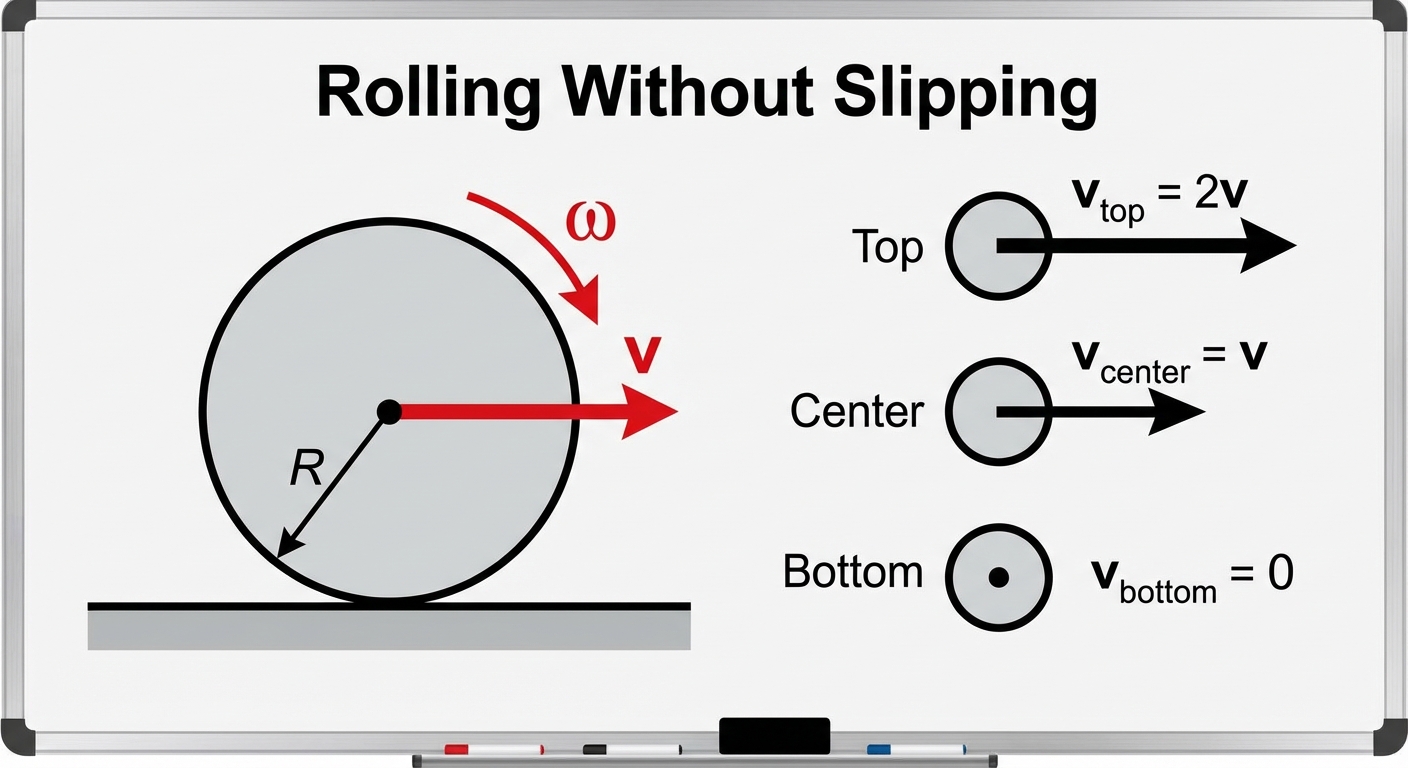
One of the most frequent exam scenarios in Unit 6 involves an object rolling without slipping. When a wheel, sphere, or cylinder rolls, it is doing two things simultaneously:
- Its Center of Mass (COM) is moving linearly ($K_{trans}$).
- It is rotating around its COM ($K_{rot}$).
Therefore, the total kinetic energy is the sum of both:
Rolling Constraint: If an object rolls without slipping, linear velocity and angular velocity are linked by the radius ($R$) of the object:
The "Race" Down the Ramp
A classic conceptual question asks: If a hoop and a solid sphere of equal mass and radius are released from rest at the top of a ramp, which reaches the bottom first?
Using conservation of energy:
- The Hoop has a high rotational inertia ($I = MR^2$). A significant hierarchy of its potential energy must be converted into spinning ($K{rot}$), leaving less energy for linear speed ($K{trans}$).
- The Solid Sphere has a lower rotational inertia ($I = \frac{2}{5}MR^2$). It is easier to rotate, so less energy is "wasted" on spinning, allowing it to acquire a higher linear speed $v$.
Result: The object with the lowest rotational inertia coefficient reaches the bottom first.
Angular Momentum
Angular Momentum ($L$) is the measure of how difficult it is to stop a rotating object. It is a vector quantity, and like linear momentum ($p$), it is conserved in isolated systems.
For Rigid Rotating Objects
For a solid object spinning about a fixed axis (like a merry-go-round or a spinning disk), angular momentum is the product of rotational inertia and angular velocity.
- Units: kg$\cdot$m$^2$/s
- Direction: Determined by the Right-Hand Rule. Curl your fingers in the direction of rotation; your thumb points in the direction of the angular momentum vector.
For a Point Particle Moving in a Straight Line
This is a non-intuitive concept for many students. A particle moving in a straight line does have angular momentum relative to a specific pivot point, even if it isn't spinning.
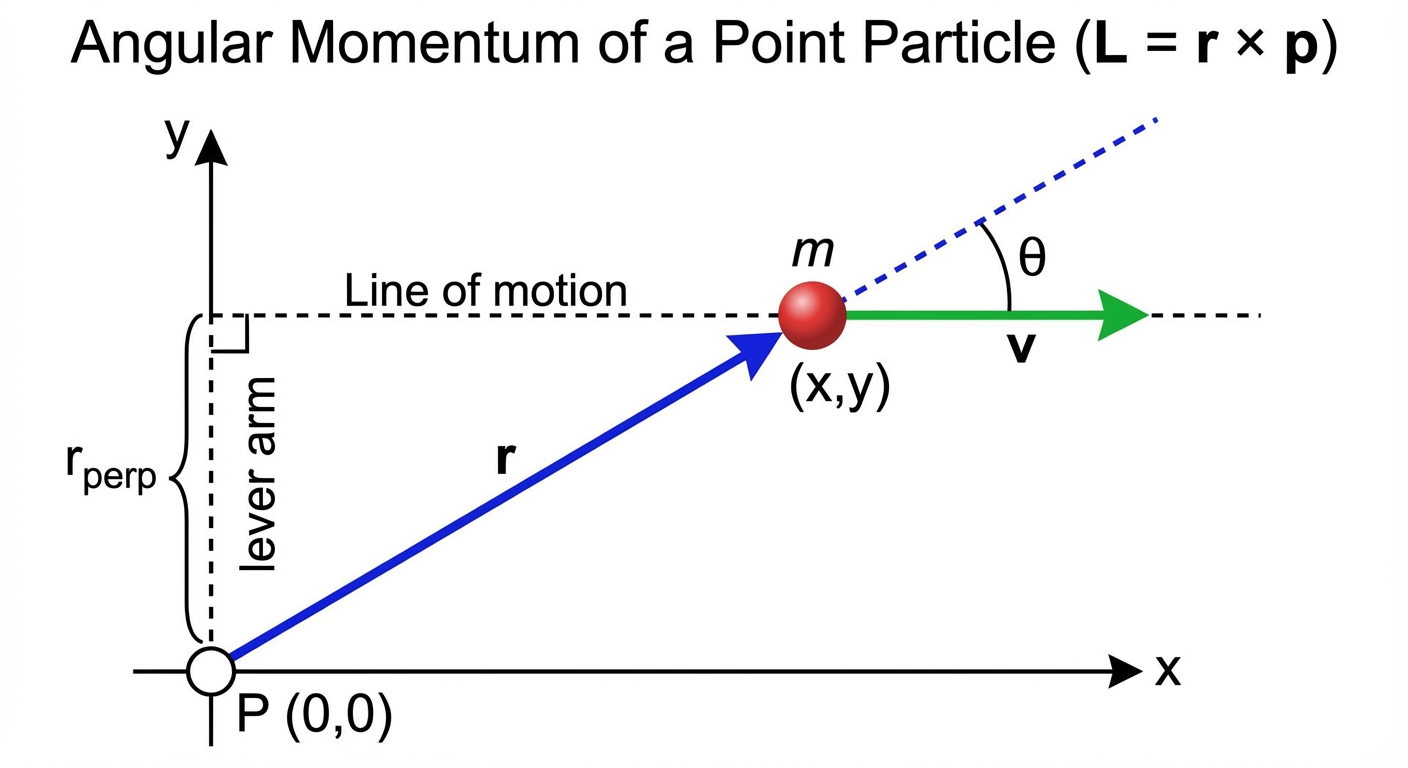
Imagine you are standing at a pivot point and watching a car drive past you. As it moves, your head has to rotate to keep it in sight. That particle possesses angular momentum calculated by:
Where:
- $m$ is the mass of the particle.
- $v$ is the linear velocity.
- $r$ is the distance from the pivot to the particle.
- $r_{\perp}$ (lever arm) is the perpendicular distance from the pivot to the line of motion.
Conservation of Angular Momentum
The law of Conservation of Angular Momentum states that if the net external torque on a system is zero, the total angular momentum of the system remains constant.
This principle explains why outcomes change when the distribution of mass ($I$) changes.
Case Study 1: The Ice Skater (Changing $I$)
Consider an ice skater spinning with arms outstretched.
- Initial State: Arms out. Large radius $\rightarrow$ Large Rotational Inertia ($I{large}$). Low Angular Velocity ($\omega{low}$).
- Action: Skater pulls arms in. No external torque is applied (ignoring friction).
- Final State: Radius decreases $\rightarrow$ Rotational Inertia decreases ($I{small}$). Angular Velocity MUST increase ($\omega{high}$) used to keep $L$ constant.
Therefore, if $I$ is halved, $\omega$ doubles.
Important Note on Energy: Kinetic Energy is NOT conserved in this scenario. The skater does work to pull their arms in against the centrifugal force. This work adds mechanical energy to the system, so $K_{rot}$ increases.
Case Study 2: Rotational Collisions
Just as linear momentum is used for car crashes, angular momentum is used for rotational collisions.
Example: A child (point mass) runs tangential to a merry-go-round (rigid disk) and jumps on.
- Note that once the child is on the disk, their inertia becomes $mR^2$ added to the disk's inertia.
Rotational Impulse and Change in Momentum
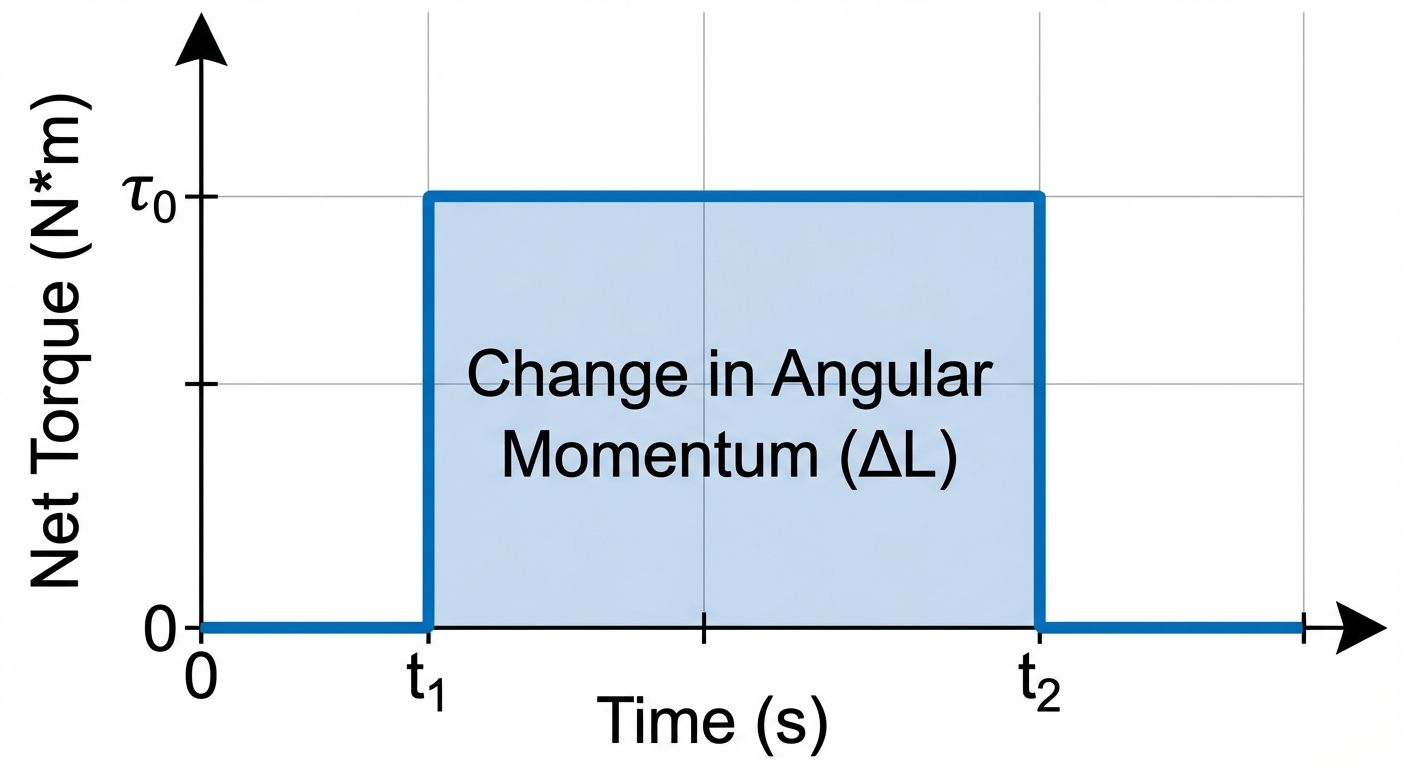
Recall the Impulse-Momentum theorem for linear motion: $J = \Delta p = F_{avg} \Delta t$. The rotational equivalent relates Torque to the change in Angular Momentum.
This equation tells us:
- To change angular momentum, an external torque must be applied over a time interval.
- The area under a Torque vs. Time graph represents the Change in Angular Momentum ($\Delta L$).
Comparison Table: Linear vs. Rotational
| Linear Concept | Formula | Rotational Concept | Formula |
|---|---|---|---|
| Linear Momentum | $p = mv$ | Angular Momentum | $L = I\omega$ |
| Newton's 2nd Law | $\Sigma F = \frac{\Delta p}{\Delta t}$ | Newton's 2nd Law (Rot) | $\Sigma \tau = \frac{\Delta L}{\Delta t}$ |
| Impulse | $J = F\Delta t = \Delta p$ | Rot. Impulse | $\Delta L = \tau \Delta t$ |
| Kinetic Energy | $K = \frac{1}{2}mv^2$ | Rot. Kinetic Energy | $K = \frac{1}{2}I\omega^2$ |
Common Mistakes & Pitfalls
1. Rolling: Friction does NOT always do Work
The Mistake: Students assume that because there is friction allowing a wheel to roll, energy is lost.
The Reality: In "rolling without slipping," the contact point between the wheel and the ground is momentarily at rest (static friction). Since the displacement of the contact point is zero, static friction does no work and does not dissipate energy. Energy is conserved.
2. Point Particle Momentum
The Mistake: Thinking a particle must be moving in a circle to have angular momentum.
The Reality: Any particle moving in a straight line has angular momentum relative to a point unless it is moving directly toward or away from that point (where the lever arm is zero).
3. Confusing Conservation of Energy with Conservation of Momentum
The Mistake: Assuming energy is conserved in the "Ice Skater" or "Collision" problems.
The Reality:
- Collisions (inelstic): Angular Momentum is conserved; Energy is lost to heat/deformation.
- Shape Change (Skater): Angular Momentum is conserved; Energy increases (due to work done by muscles).
4. Forgetting the Axis of Rotation
The Mistake: Calculating $I$ or $L$ without defining the pivot.
The Reality: Inertia ($I$) depends entirely on where the axis is. A rod spinning around its center ($I=\frac{1}{12}ML^2$) is easier to stop than a rod spinning around its end ($I=\frac{1}{3}ML^2$). Always check the pivot point!