Advanced Dynamics of Rotational Paths
Uniform Circular Motion (UCM)
In AP Physics C, circular motion is the study of objects moving along a curved path of constant radius. While the geometry is simple, the application of Newton's Laws requires a rigorous understanding of vectors and reference frames.
Kinematics of UCM
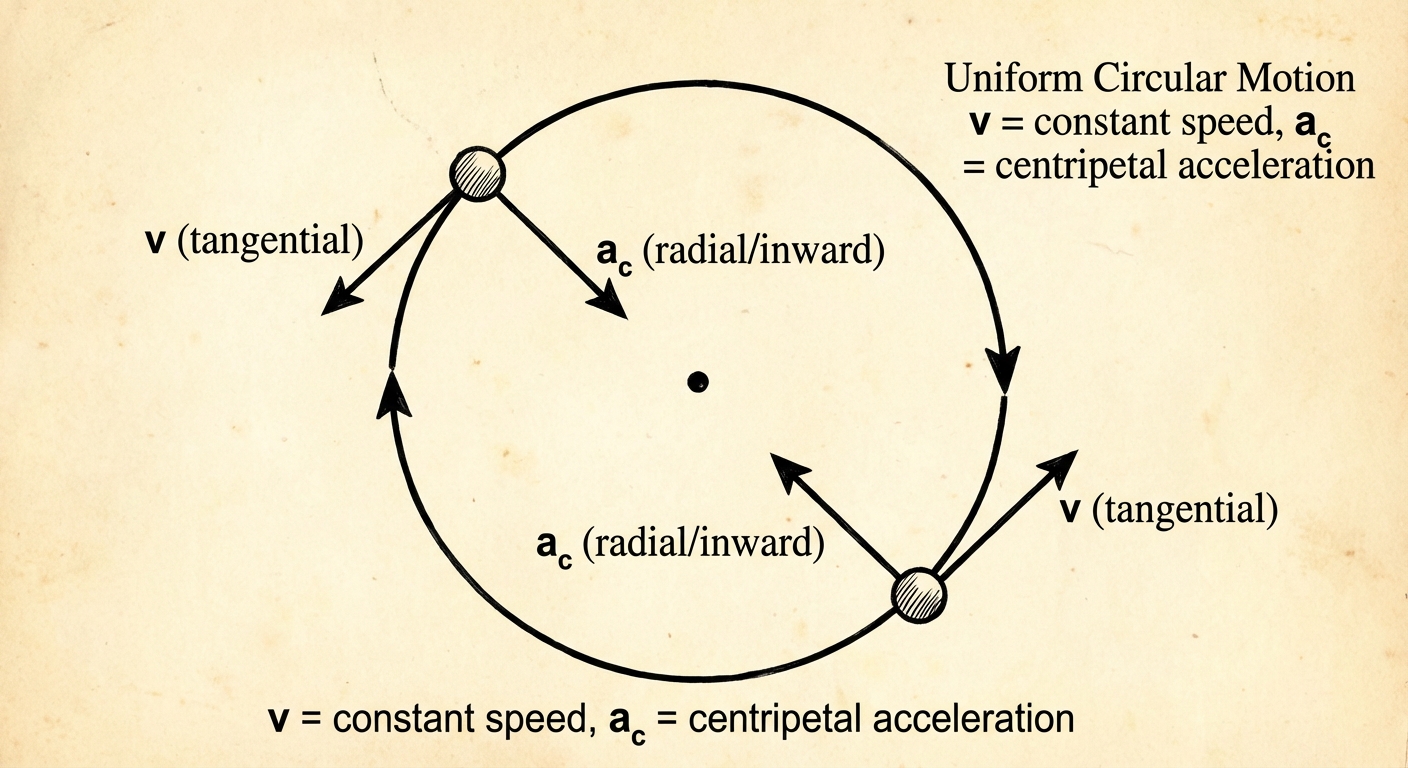
Uniform Circular Motion is defined as motion in a circle at a constant speed.
It is crucial to distinguish between speed and velocity here:
- Speed ($v$): Constant magnitude.
- Velocity ($\vec{v}$): Constantly changing direction. Because velocity is a vector, a change in direction constitutes a change in velocity, which implies acceleration.
Period and Frequency
The time it takes to complete one full revolution is the Period ($T$). The number of revolutions per unit time is the Frequency ($f$).
Centripetal Acceleration
Even though the object does not speed up or slow down, it accelerates because the direction of the velocity vector changes. This acceleration is always directed toward the center of the circle.
Key Formulas:
Where:
- $v$ = linear speed (m/s)
- $r$ = radius of the path (m)
- $\omega$ = angular velocity (rad/s)
Calculus Derivation (AP Physics C Requirement)
To derive this using calculus, consider a particle moving in a circle of radius $R$. The position vector $\vec{r}$ can be written using unit vectors:
Differentiating with respect to time gives velocity:
Differentiating again gives acceleration:
Notice that $\vec{a}(t) = -\omega^2 \vec{r}(t)$. The negative sign indicates the acceleration is directed opposite to the position vector—i.e., inward toward the center.
Dynamics: Centripetal Force
According to Newton's Second Law ($\Sigma \vec{F} = m\vec{a}$), if there is a centripetal acceleration, there must be a net force causing it. This net force is called the Centripetal Force.
Crucial Concept: "Centripetal force" is not a specific type of force like gravity, tension, or friction. It is a label for the resultant force required to keep an object in circular motion. It is the job description; the actual forces (gravity, tension, static friction) are the employees doing the job.
Examples:
- Car on a flat curve: Static friction acts as the centripetal force.
- Satelite in orbit: Gravitational force acts as the centripetal force.
- Ball on a string: Tension acts as the centripetal force.
Non-Uniform Circular Motion
In Non-Uniform Circular Motion, the object moves along a circular path but its speed varies. This occurs, for example, when a car speeds up while turning a corner or a roller coaster moves through a vertical loop.
Acceleration Components
Because the speed is changing and the direction is changing, the total acceleration vector $\vec{a}_{net}$ has two perpendicular components:
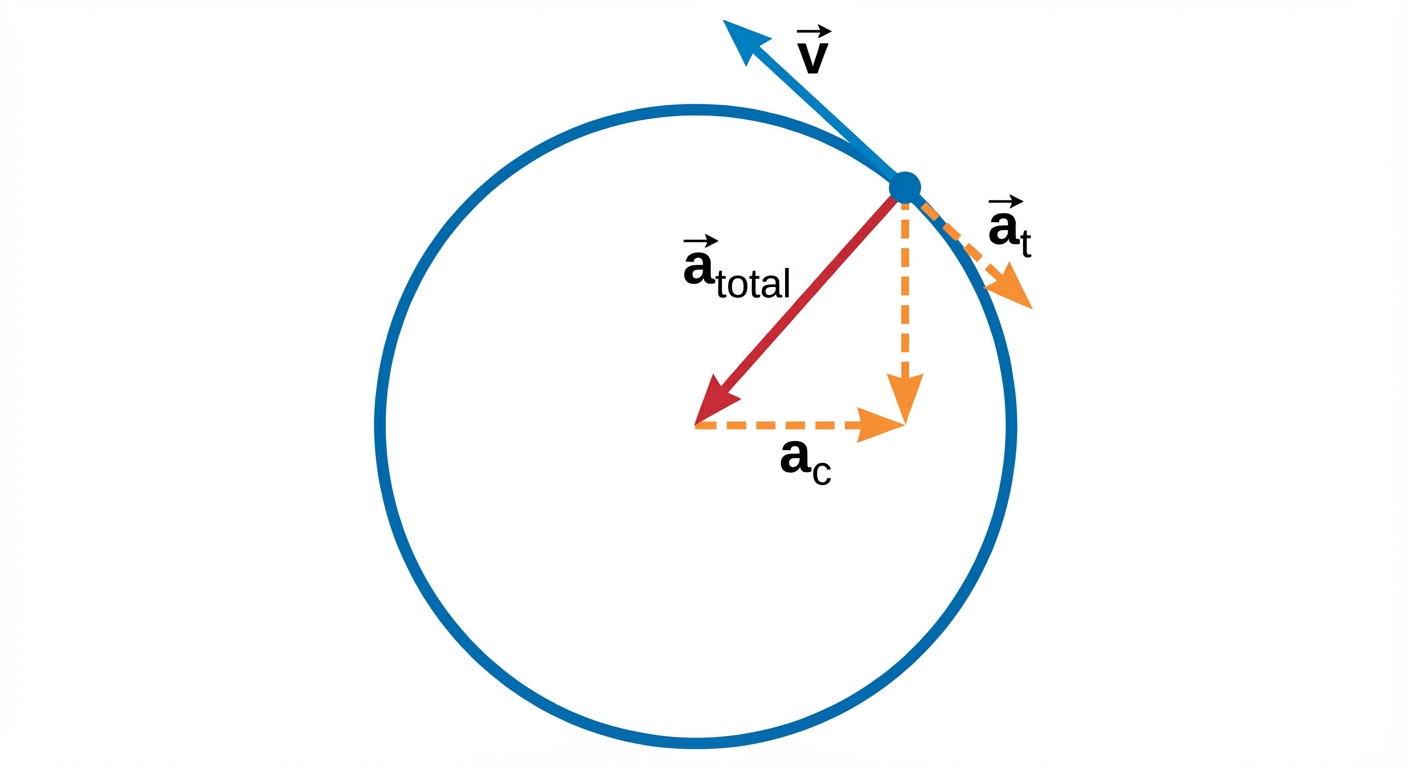
Radial (Centripetal) Acceleration ($ac$ or $ar$):
- Responsible for changing the direction of velocity.
- Always points toward the center.
- Magnitude: $a_c = v^2/r$ (calculated using the instantaneous speed).
Tangential Acceleration ($a_t$):
- Responsible for changing the magnitude of velocity (speed).
- Points tangent to the circle (parallel to velocity if speeding up, antiparallel if slowing down).
- Magnitude: $a_t = \frac{dv}{dt}$ or $r\alpha$ (where $\alpha$ is angular acceleration).
Theoretically Derived Notation
In polar coordinates, the total acceleration vector is:
For a fixed radius ($r=$ constant, $\dot{r}=0, \ddot{r}=0$), this simplifies to:
This confirms the two components: $-r\omega^2$ is the inward radial acceleration, and $r\alpha$ is the tangential acceleration.
The Vertical Circle (Classic Application)
Consider an object swinging in a vertical circle on a string (or a roller coaster loop). Non-uniform motion applies because gravity acts downwards, accelerating the object on the way down and decelerating it on the way up.
Analysis Strategy:
- Draw the FBD. The weight ($mg$) always points down. Tension ($T$) or Normal force ($F_N$) points toward the center.
- Write Newton's Second Law for the radial direction: $\Sigma F{radial} = mac$.
At the Bottom of the Loop:
Tension points up (center), Gravity points down (away).
Observation: Tension is maximum at the bottom because it must support the weight AND provide centripetal force.
At the Top of the Loop:
Both Tension and Gravity point down (center).
Minimum Speed Condition:
To just barely make it over the top without the string going slack (or the car falling), set $T = 0$ (or $FN = 0$).
Applications: Banked Curves
Engineers bank curves on roads so vehicles can turn safely at higher speeds or without relying entirely on friction.
Frictionless Banked Curve
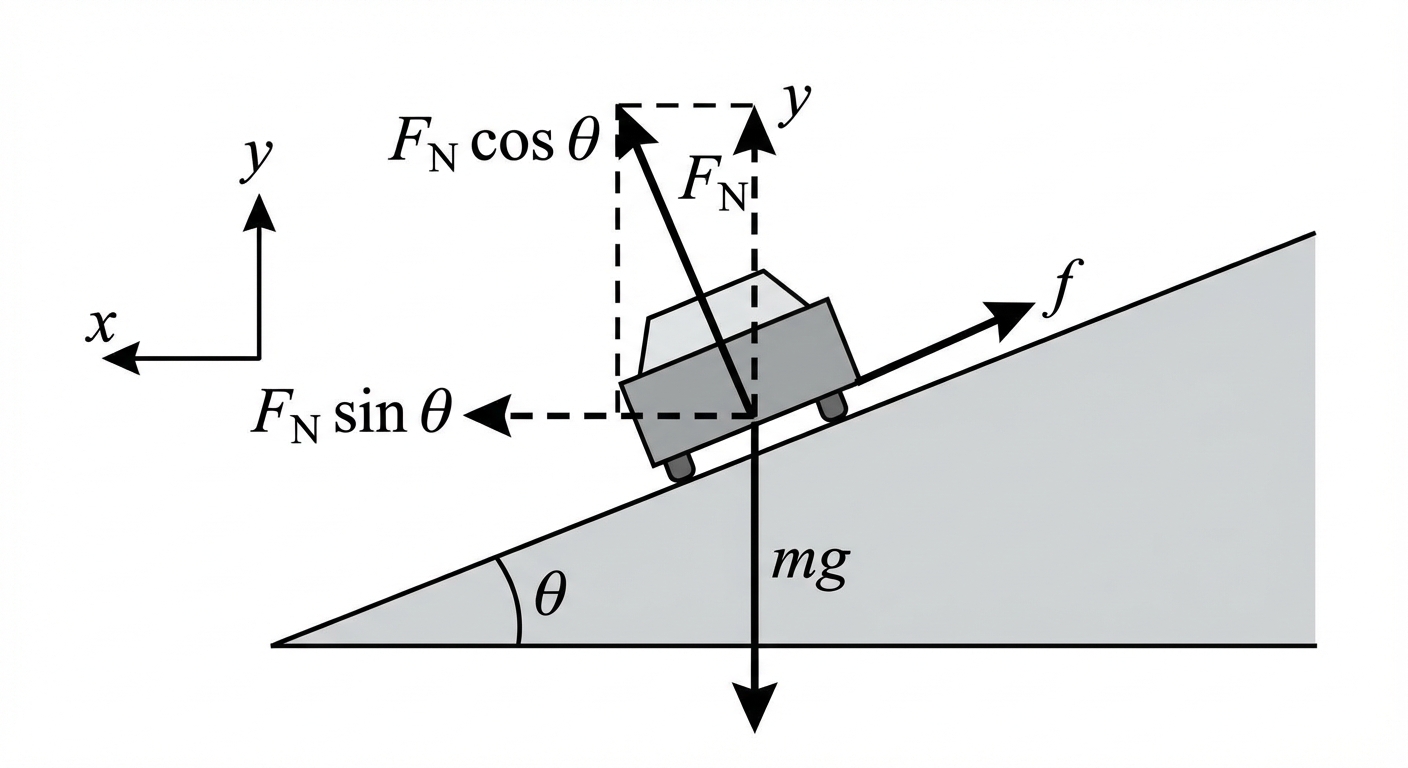
When a car takes a banked curve without friction, the Normal Force ($FN$) is the only force capable of providing the horizontal centripetal acceleration. We must decompose $FN$ rather than gravity, because the acceleration is horizontal (toward the center of the turn), not down the slope.
- Vertical Equilibrium: $F_N \cos\theta = mg$
- Horizontal Dynamics: $FN \sin\theta = mac = \frac{mv^2}{r}$
Dividing the horizontal equation by the vertical equation:
This gives the design speed for a specific banking angle: $v = \sqrt{gr \tan\theta}$.
Common Mistakes & Pitfalls
The "Centrifugal" Force Fallacy:
- Mistake: Students often draw an outward pointing force labeled "centrifugal force" on Free Body Diagrams.
- Correction: Centrifugal force is a "fictitious" force that only appears if you are observing from a non-inertial (rotating) reference frame. In AP Mechanics, always solve from an inertial frame (the ground). The only forces are real interactions (gravity, tension, friction/normal).
Assuming Constant Acceleration in UCM:
- Mistake: Using kinematic equations like $v = v_0 + at$ for circular motion.
- Correction: In UCM, the magnitude of acceleration is constant, but the direction changes continuously. Linearly kinematic equations do not apply directly to the vectors. Use rotational kinematics or energy methods.
Misidentifying the Force Directions:
- Mistake: On a banked curve, assuming the Normal force equals $mg\cos\theta$.
- Correction: That is only true on a stationary inclined plane. In a banked turn, the vertical component of the Normal force must equal $mg$, so $FN = mg / \cos\theta$, which means $FN > mg$.