Dynamics: Forces and Newton's Laws of Motion
Introduction to Newton's First Law and Inertia
Newton's Laws of Motion form the foundation of classical mechanics. Unit 2 specifically bridges the gap between kinematics (describing motion) and dynamics (explaining the causes of motion).
Inertial Reference Frames
Newton's First Law states that an object at rest remains at rest, and an object in motion remains in motion at a constant velocity, unless acted upon by a net external force. This property of matter to resist changes in its motion is known as Inertia.
This law is valid only in Inertial Reference Frames—frames that are not accelerating. If you are in a car that brakes suddenly, you feel thrown forward. This is not a real force pushing you; it is your inertia attempting to maintain your velocity while the reference frame (the car) decelerates underneath you.
Equilibrium
When the sum of all forces acting on a system is zero, the system is in equilibrium.
- Static Equilibrium: The object is at rest ($v = 0, a = 0$).
- Dynamic Equilibrium: The object is moving at a constant velocity ($v \neq 0, a = 0$).
Mathematic Condition for Equilibrium:
Newton's Second Law: The Fundamental Equation
While the First Law defines the condition for zero acceleration, the Second Law describes what happens when forces are unbalanced.
Newton's Second Law states that the acceleration of an object is directly proportional to the net force acting on it and inversely proportional to its mass.
Where:
- $\vec{F}_{net} = \sum \vec{F}$ is the vector sum of all external forces (measured in Newtons, N).
- $m$ is the inertial mass (kg).
- $\vec{a}$ is the acceleration vector ($m/s^2$).
Component Analysis
Because force and acceleration are vectors, this equation implies scalar equations for each independent axis:
For AP Physics C, you must often utilize calculus. If the force is a function of time, you can relate it to the derivative of momentum or kinematic variables:
Newton's Third Law: Interaction Pairs
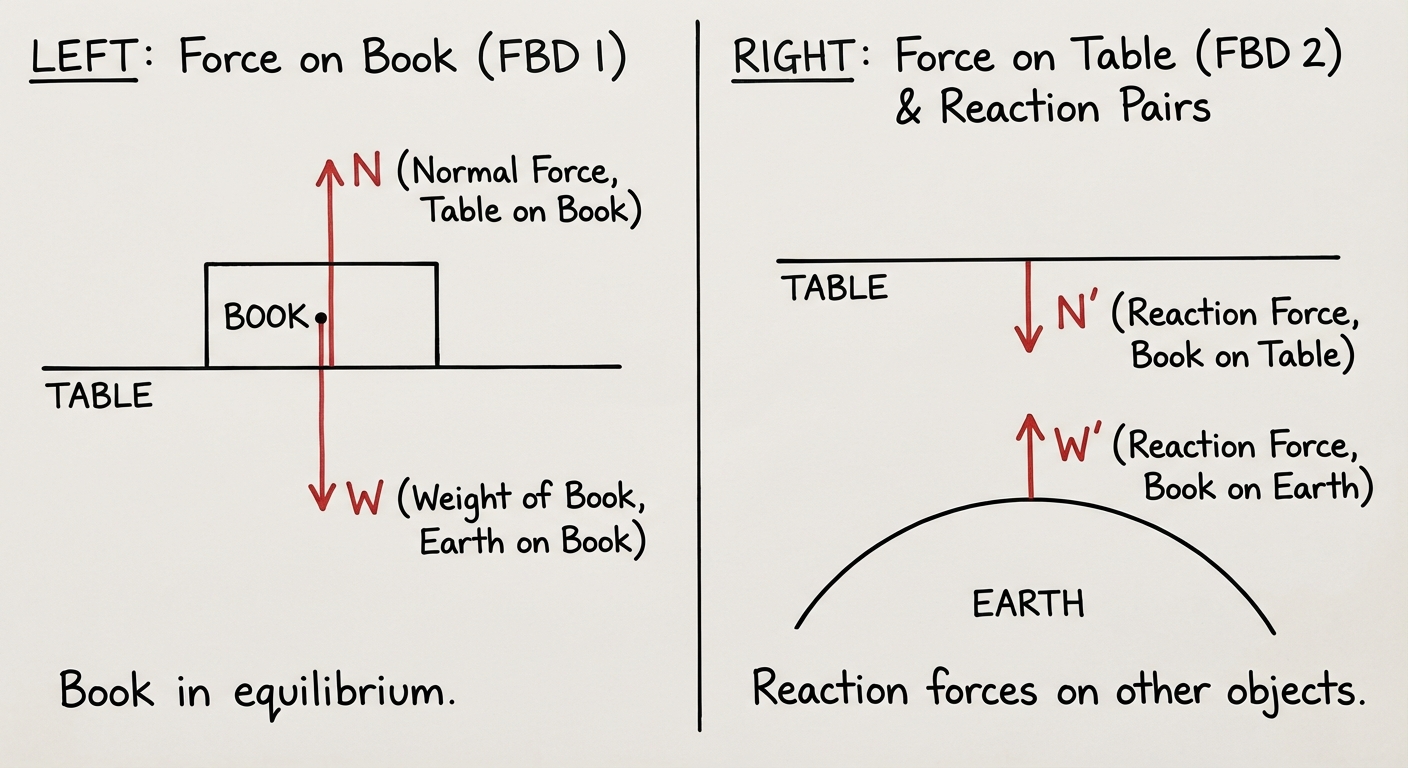
Newton's Third Law states that whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first.
Crucial Characteristics
- Simultaneity: The forces occur at the exact same instant.
- Different Objects: Action and reaction forces never act on the same object. Therefore, they never cancel each other out when analyzing the motion of a single object.
- Same Type: If the earth pulls on a ball (gravitational), the ball pulls on the earth (gravitational).
Types of Forces and Free Body Diagrams
To solve dynamics problems, you must isolate the object of interest and draw a Free Body Diagram (FBD). The FBD should represent the object as a point particle (unless torque is involved) with force vectors originating from the dot.
1. Gravitational Force (Weight)
The force strictly due to gravity.
Always points vertically downward (towards the center of the Earth).
2. Normal Force ($F_N$ or $N$)
A contact force exerted by a surface, perpendicular to that surface. It is a reactive force; it adjusts its magnitude to prevent objects from passing through each other.
Note: $FN$ is not always equal to $mg$. On an incline or inside an elevator, $FN$ varies.
3. Tension ($T$)
A pulling force transmitted through a string, rope, or cable. For ideal strings (massless, inextensible), tension is uniform throughout the string.
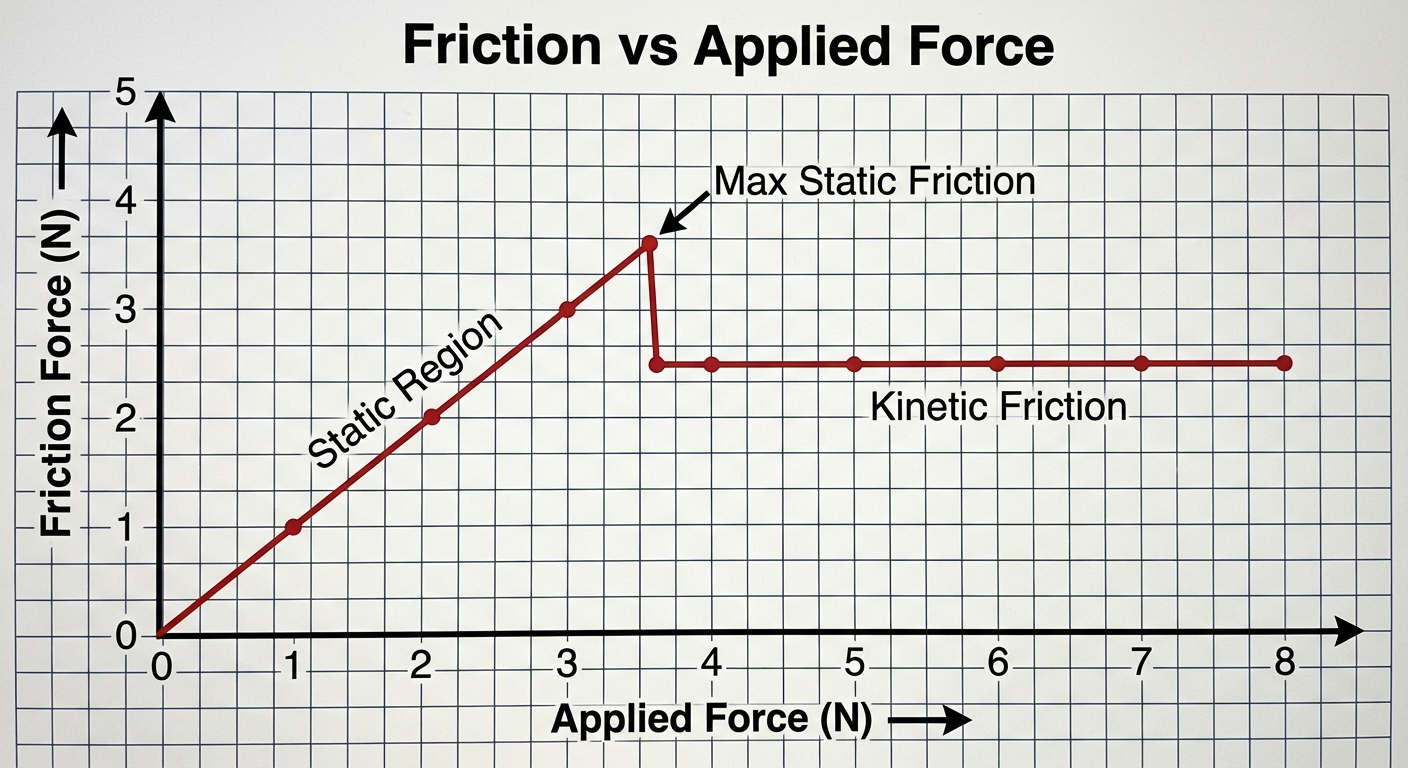
4. Friction ($f$)
A resistive force parallel to the surface, opposing the direction of motion (or potential motion).
Static Friction ($fs$): Prevents slipping. It is a variable force that matches the applied force up to a maximum limit.
Kinetic Friction ($fk$): Acts when there is relative sliding.
Generally, $\mus > \muk$ (it is harder to start moving an object than to keep it moving).
5. Spring Force (Hooke's Law)
The restoring force exerted by an ideal spring.
Where $k$ is the spring constant (N/m) and $x$ is the displacement from equilibrium.
Drag Force and Terminal Velocity (Calculus Application)
In AP Physics C, you must handle forces that depend on velocity (air resistance). The drag force $F_D$ usually takes one of two forms:
- Slow motion: $F_D = -bv$ (Proportional to velocity)
- Fast motion: $F_D = -cv^2$ (Proportional to velocity squared)
Deriving Terminal Velocity
When an object falls, gravity pulls down and drag pushes up. Terminal velocity ($v_t$) occurs when acceleration is zero ($a=0$).
For $FD = -bv$:
Solving the Differential Equation
To find velocity as a function of time $v(t)$, apply Newton's Second Law:
Separate variables and integrate:
This typically results in an exponential approach to terminal velocity:
Application: Inclined Planes and Coupled Systems
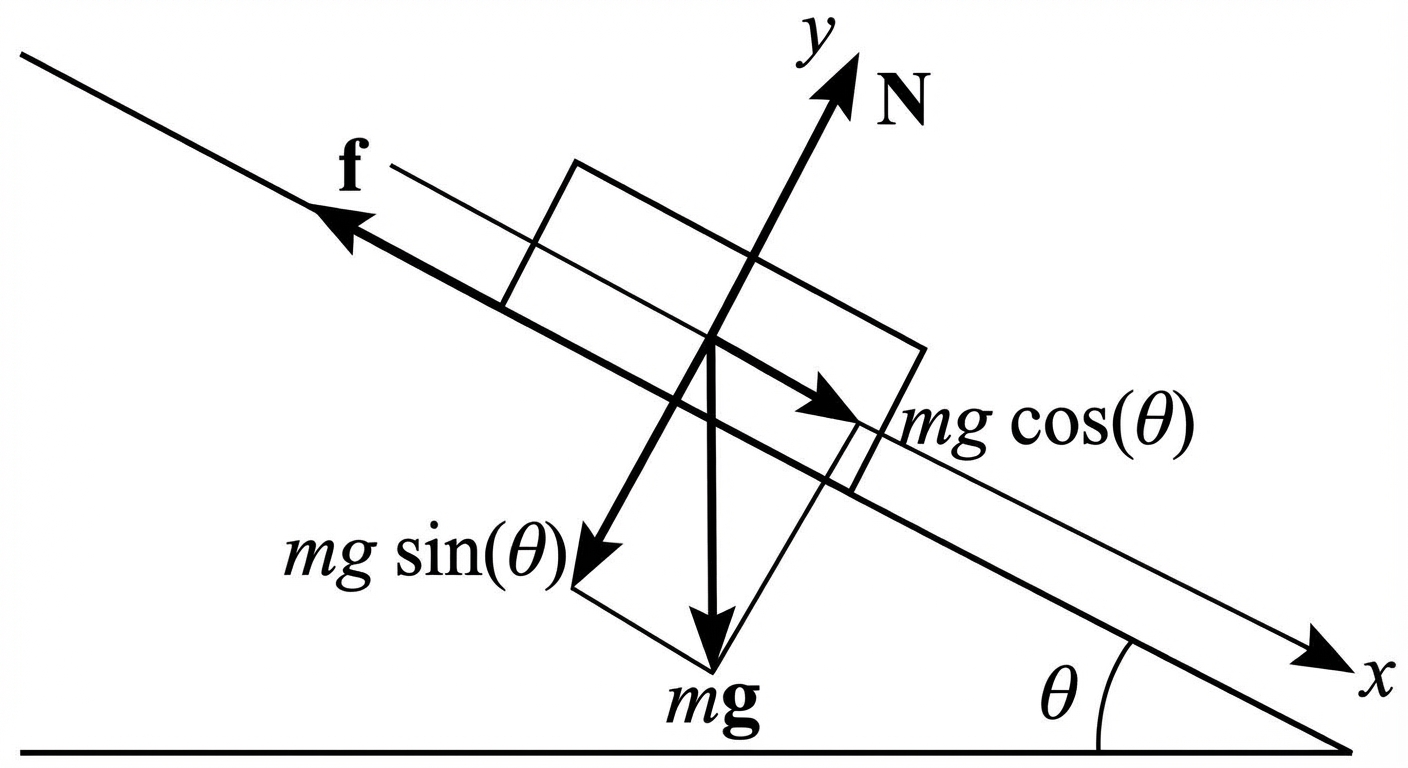
Strategy for Inclined Planes
When an object sits on an angle $\theta$:
- Rotate your coordinate system so the x-axis is parallel to the slope and y-axis is perpendicular.
- Decompose Gravity:
- $F_{g,x} = mg \sin\theta$ (pulls object down the slope)
- $F_{g,y} = mg \cos\theta$ (pushes object into the slope)
Strategy for Coupled Systems (Atwood Machines)
For two masses connected by a string:
- Method 1: System Approach. Treat the connected masses as one "system" moving along a single line of travel.
- Method 2: Individual FBDs. Draw an FBD for each mass. Write $\sum F = ma$ for each. Solve the system of linear equations (Tension usually cancels out).
Example Scenario: Modified Atwood (Table + Hanging Mass)
Mass $m1$ on a table (friction $\mu$) connected to hanging mass $m2$.
- $m1$: $T - fk = m1 a \quad \Rightarrow \quad T - \mu m1 g = m_1 a$
- $m2$: $m2 g - T = m_2 a$
- Add equations: $m2 g - \mu m1 g = (m1 + m2)a$
Circular Motion Dynamics
Centripetal Force is not a specific type of physical force like gravity or tension. It is a label for the net force that causes circular motion.
Uniform Circular Motion (UCM)
Acceleration is always directed toward the center of the circle.
Non-Uniform Circular Motion
If the speed changes while turning, the object has both:
- Radial (Centripetal) Acceleration: Changes direction ($v^2/r$).
- Tangential Acceleration: Changes speed ($dv/dt$).
Total acceleration vector: $\vec{a}{total} = \vec{a}c + \vec{a}_t$.
Banked Curves
Civil engineers bank curves so cars can turn without relying solely on friction. The Normal Force provides the centripetal component.
For a car on a banked curve $\theta$ without friction:
- Vertical Equilibrium: $N \cos\theta = mg$
- Horizontal (Radial) Force: $N \sin\theta = m\frac{v^2}{r}$
Dividing these equations yields the design speed:
Common Mistakes & Pitfalls
- The "Fictitious" Force Fallacy: Students often feel an outward force when turning (centrifugal force). In inertial frames, this force does not exist. It is simply your inertia wanting to go straight while the car turns inward.
- Normal Force Assumption: Never assume $N = mg$ automatically. $N$ must be solved for using $\sum F_y = 0$. On an incline, $N = mg\cos\theta$. If a rope pulls upward at an angle, $N = mg - T\sin\theta$.
- Static Friction Misunderstanding: $fs = \mus N$ is only true when the object is about to slip. Otherwise, $f_s$ simply equals whatever force is pushing the object, up to the limit.
- Third Law Confusion: "If the horse pulls the cart and the cart pulls the horse back equally, how do they move?" Answer: The forces act on different objects. The cart moves because the net force on the cart (Horse's pull minus friction) is positive.