Unit 7 Guide: Comprehensive Oscillations Study Notes
Representing and Analyzing Simple Harmonic Motion
Simple Harmonic Motion (SHM) is a specific type of periodic motion where the restoring force is directly proportional to the displacement and acts in the direction opposite to that displacement. This is the fundamental definition you need for AP Physics 1.
The Conditions for SHM
Not all back-and-forth motion is SHM. For a system to undergo SHM, it must satisfy Hooke's Law:
Where:
- $F_{restoring}$ is the net force moving the object back to equilibrium.
- $k$ is a constant (like the spring constant).
- $x$ is the displacement from equilibrium.
- The negative sign indicates the force opposes the displacement.
Kinematic Variables in SHM
To analyze oscillations, we use specific variables distinct from linear kinematics:
- Amplitude ($A$): The maximum displacement from the equilibrium position. It is always positive.
- Period ($T$): The time it takes to complete one full cycle (seconds).
- Frequency ($f$): The number of cycles completed per second (Hertz, Hz).
Graphical Representation of Motion
Depending on where the object starts ($t=0$), the position can be modeled using sine or cosine functions. If looking at a standard block-spring system starting at positive amplitude ($+A$) and released from rest:
This creates a sinusoidal graph. It is crucial to understand the relationship between position ($x$), velocity ($v$), and acceleration ($a$).
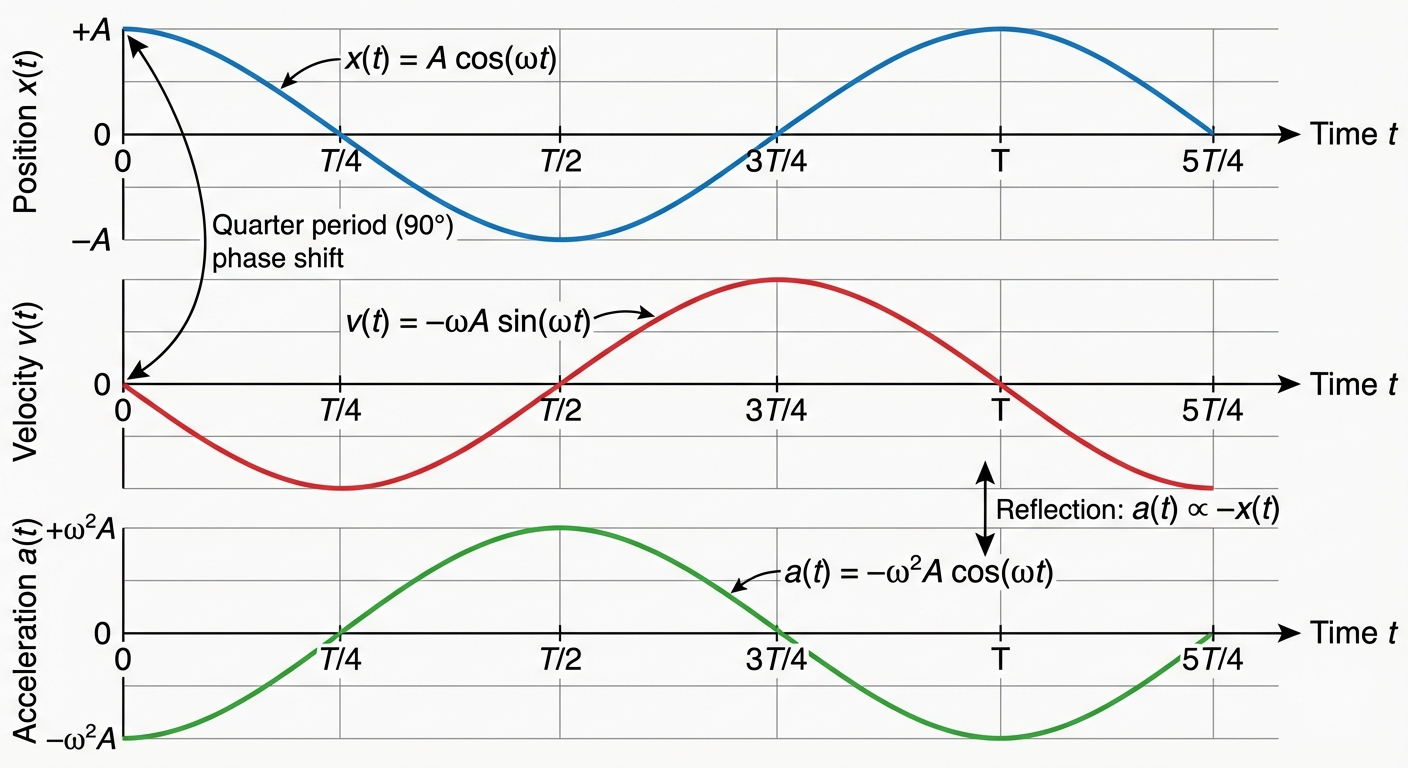
Key Phase Relationships:
- Position vs. Velocity: When position is at a maximum (amplitude), velocity is zero (the object stops momentarily to turn around). When position is zero (equilibrium), velocity is at its maximum magnitude.
- Position vs. Acceleration: Acceleration is always proportional to the negative of position ($a \propto -x$). When $x$ is at $+A$, acceleration is at its maximum negative value. When passing through equilibrium ($x=0$), acceleration is zero.
Factors Affecting Period
The period of an oscillator depends only on the physical properties of the system, not on the amplitude (for ideal SHM).
1. Spring-Mass System
For a mass $m$ attached to a spring with constant $k$:
- Mass Independence: A heavier mass moves slower, increasing the period.
- Stiffness Independence: A stiffer spring (higher $k$) exerts more force, decreasing the period.
- Gravity Independence: A vertical spring oscillates with the same period as a horizontal one (gravity only shifts the equilibrium position).
2. Simple Pendulum
For a point mass suspended by a string of length $L$:
- Mass Independence: The mass of the bob does not affect the period of a pendulum.
- Length Dependence: A longer string increases the period.
- Gravity Dependence: A pendulum on the Moon (lower $g$) would oscillate slower than on Earth.
- Condition: This formula is only an approximation for small angles (typically $\theta < 15^\circ$).
Energy of Simple Harmonic Oscillators
In an ideal SHM system (no friction or air resistance), the total mechanical energy ($E{total}$) is conserved. Energy constantly transforms between Elastic Potential Energy ($Us$) and Kinetic Energy ($K$).
Energy Formulas
Total Mechanical Energy is determined by the amplitude ($A$) and the spring constant ($k$). Since velocity is zero at the amplitude, all energy is potential:
At any point in the motion, the conservation of energy equation holds:
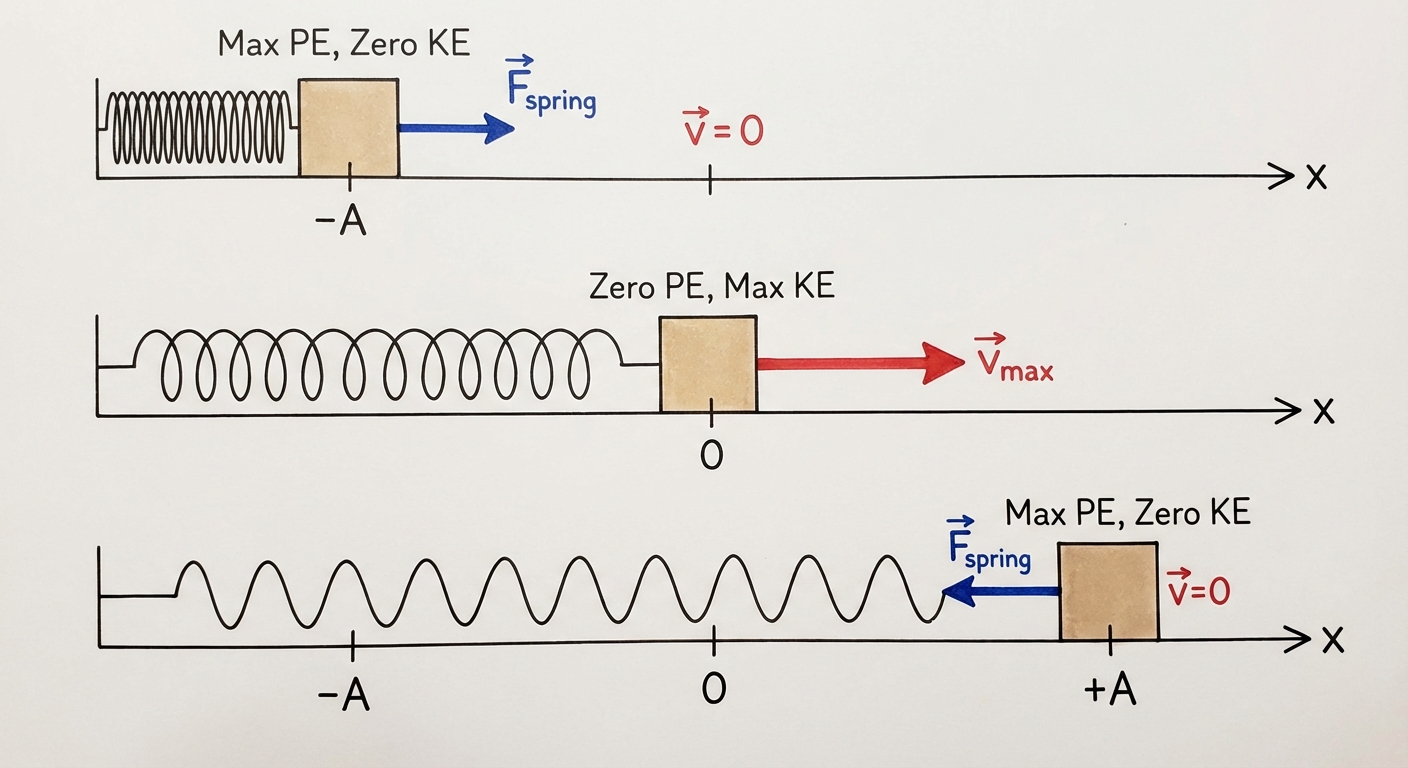
Energy Transformations
| Position | Displacement ($x$) | Potential Energy ($U_s$) | Kinetic Energy ($K$) | Velocity ($v$) |
|---|---|---|---|---|
| Max Amplitude | $x = \pm A$ | Max ($\frac{1}{2}kA^2$) | Zero ($0J$) | Zero |
| Equilibrium | $x = 0$ | Zero ($0J$) | Max ($\frac{1}{2}mv_{max}^2$) | Max |
| Intermediate | $0 < | x | < A$ | Non-zero |
Calculating Maximum Velocity
We can derive the maximum velocity (which occurs at equilibrium) by setting the maximum potential energy equal to the maximum kinetic energy:
Solving for $v_{max}$:
Graphical Analysis of Energy
When plotting Energy vs. Position, the Potential Energy curve ($U_s = \frac{1}{2}kx^2$) forms a parabola opening upward. The Total Energy line is a horizontal constant line above it. The difference between the Total Energy line and the PE parabola represents the Kinetic Energy.
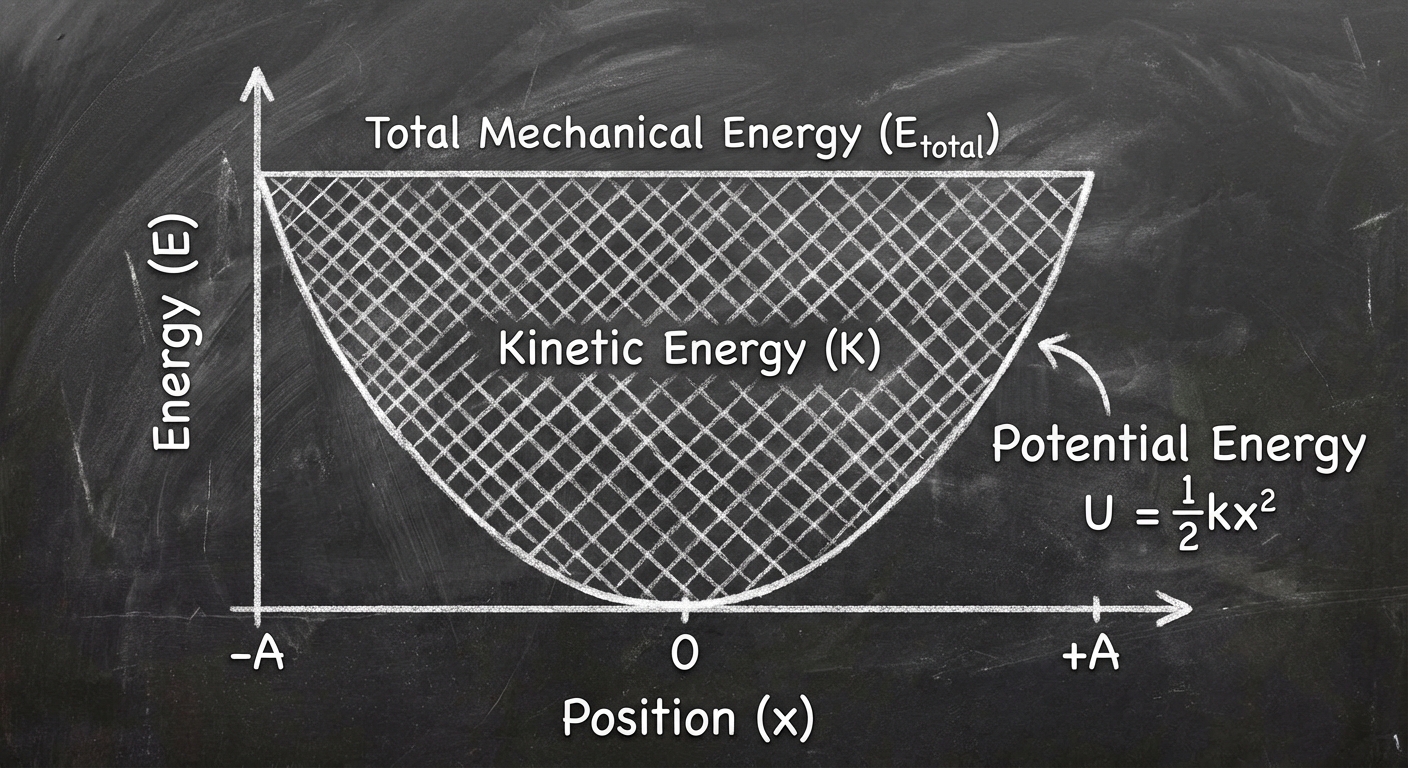
Interpretation:
- The "well" shape visually confines the particle between $-A$ and $+A$.
- At $x=0$, the gap between the parabola and the total energy line is largest, indicating maximum KE.
Example Problem: The Horizontal Spring
Problem: A 0.5 kg block attached to a spring ($k = 50 \text{ N/m}$) is pulled 0.2 m from equilibrium and released from rest.
- Calculate the period of oscillation.
- Calculate the maximum speed of the block.
Solution:
1. Period:
Using the spring formula:
2. Max Speed:
Using Conservation of Energy ($U{max} = K{max}$):
Common Mistakes & Pitfalls
Confusing Acceleration and Velocity:
- Mistake: Thinking acceleration is zero at the endpoints because the object stops.
- Correction: At endpoints (Amplitude), the spring is stretched the most ($F_{max}$), so acceleration is at its maximum, even though velocity is zero.
Pendulum Mass Confusion:
- Mistake: Thinking a heavier pendulum bob swings faster (shorter period).
- Correction: Mass cancels out not only in free fall but also in pendulum motion. Mass does not affect pendulum period.
Amplitude and Period:
- Mistake: Thinking that pulling a spring back further (increasing $A$) increases the period.
- Correction: In ideal SHM, period is independent of amplitude. A larger amplitude means the object travels a longer distance, but it travels faster (higher restoring force), canceling out exactly to result in the same time per cycle.
Radians vs. Degrees:
- Mistake: Using degrees in your calculator when evaluating $\cos(2\pi f t)$.
- Correction: The argument $(2\pi f t)$ is in radians. Always set your calculator to Radian Mode for SHM time-dependence equations.