Comprehensive Guide to Rotational Energy in AP Physics 1
Rotational Kinetic Energy
When you studied linear dynamics, you learned that any moving object possesses kinetic energy. The same logic applies to rotating objects. Even if an object's center of mass is stationary (like a spinning bicycle wheel held in the air), the particles making up that object are moving and therefore possess kinetic energy.
Defining Rotational Kinetic Energy
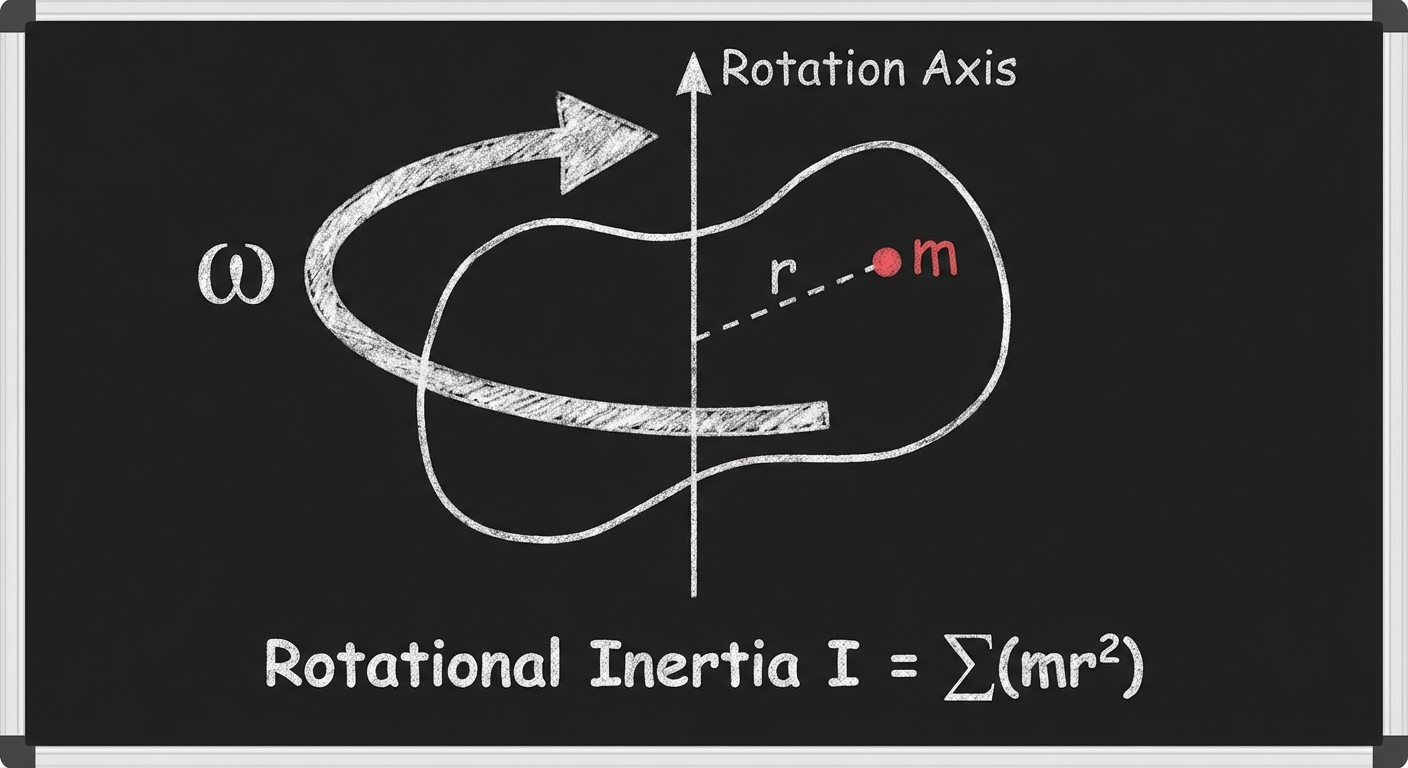
Rotational Kinetic Energy ($K_{rot}$) is the energy an object possesses due to its rotation around an axis.
Unlike translational kinetic energy, which depends on mass ($m$) and linear velocity ($v$), rotational kinetic energy depends on Rotational Inertia (or Moment of Inertia, $I$) and Angular Velocity ($\omega$).
The Formula
To calculate the kinetic energy of a rotating rigid body, utilize the following formula:
Where:
- $K_{rot}$ = Rotational Kinetic Energy (measured in Joules, J)
- $I$ = Rotational Inertia (measured in $kg\cdot m^2$)
- $\omega$ = Angular Velocity (measured in radians per second, $rad/s$)
Comparison: Translation vs. Rotation
Physics is full of symmetries. If you understand the linear version of a concept, you can almost always map it to a rotational equivalent.
| Concept | Translational (Linear) | Rotational |
|---|---|---|
| Inertia | Mass ($m$) | Rotational Inertia ($I$) |
| Velocity | Velocity ($v$) | Angular Velocity ($\omega$) |
| Energy | $K_{trans} = \frac{1}{2}mv^2$ | $K_{rot} = \frac{1}{2}I\omega^2$ |
Total Kinetic Energy (Rolling Motion)
One of the most frequent scenarios in AP Physics 1 is rolling motion (e.g., a ball rolling down a ramp). A rolling object exhibits both types of motion simultaneously:
- The Center of Mass (COM) moves linearly ($v_{cm}$).
- The object rotates around the COM ($\omega$).
Therefore, the Total Kinetic Energy ($K_{total}$) is the sum of both energies:
Key Constraint - Rolling Without Slipping:
If an object rolls without slipping, the linear velocity and angular velocity are linked by the radius ($R$):
Worked Example: The Rolling Disk
A solid disk of mass $M$ and radius $R$ rolls without slipping on a flat surface with linear speed $v$. Calculate its total kinetic energy in terms of $M$ and $v$.
Solution:
- Identify the formula: $K_{total} = \frac{1}{2}Mv^2 + \frac{1}{2}I\omega^2$
- Identify $I$ for a solid disk: $I = \frac{1}{2}MR^2$
- Substitute the rolling constraint ($\omega = \frac{v}{R}$):
- Simplify the rotational term:
- Add them together:
Torque and Work
Just as Force does work on a linear system to change its translational kinetic energy, Torque does work on a rotating system to change its rotational kinetic energy.
Work Done by Torque
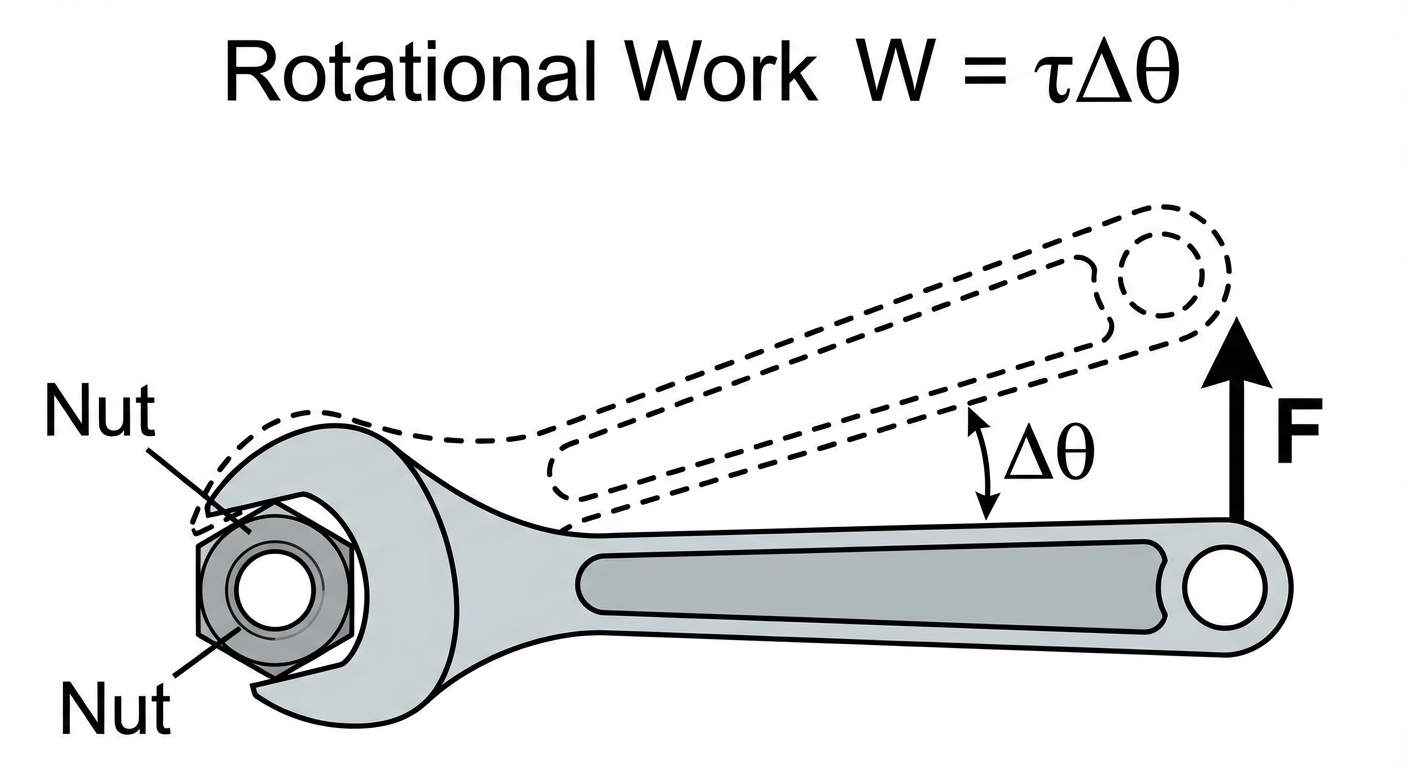
In linear physics, Work is force applied over a distance ($W = F\Delta x$). In rotational physics, Work is torque applied over an angular displacement.
Where:
- $W$ = Work (Joules)
- $\tau$ = Constant Torque ($N\cdot m$)
- $\Delta \theta$ = Angular displacement (must be in radians)
The Rotational Work-Energy Theorem
The Net Work done on a rotating object results in a change in its rotational kinetic energy. This is the rotational equivalent of the Work-Energy Theorem.
Important Concept Application:
If you apply a constant torque to a flywheel initially at rest, the work you do is converted entirely into rotational kinetic energy (assuming no friction losses).
Rotational Power
Power is the rate at which work is done. By modifying the linear power equation ($P = Fv$), we get the rotational version:
Common Mistakes & Pitfalls
1. The RPM Trap
Mistake: Using Revolutions Per Minute (RPM) directly in energy formulas.
Correction: The formula $K = \frac{1}{2}I\omega^2$ only works if $\omega$ is in radians per second. Always convert before calculating: $1 \text{ rev} = 2\pi \text{ radians}$ and $1 \text{ min} = 60 \text{ seconds}$.
2. The Rolling Race Misconception
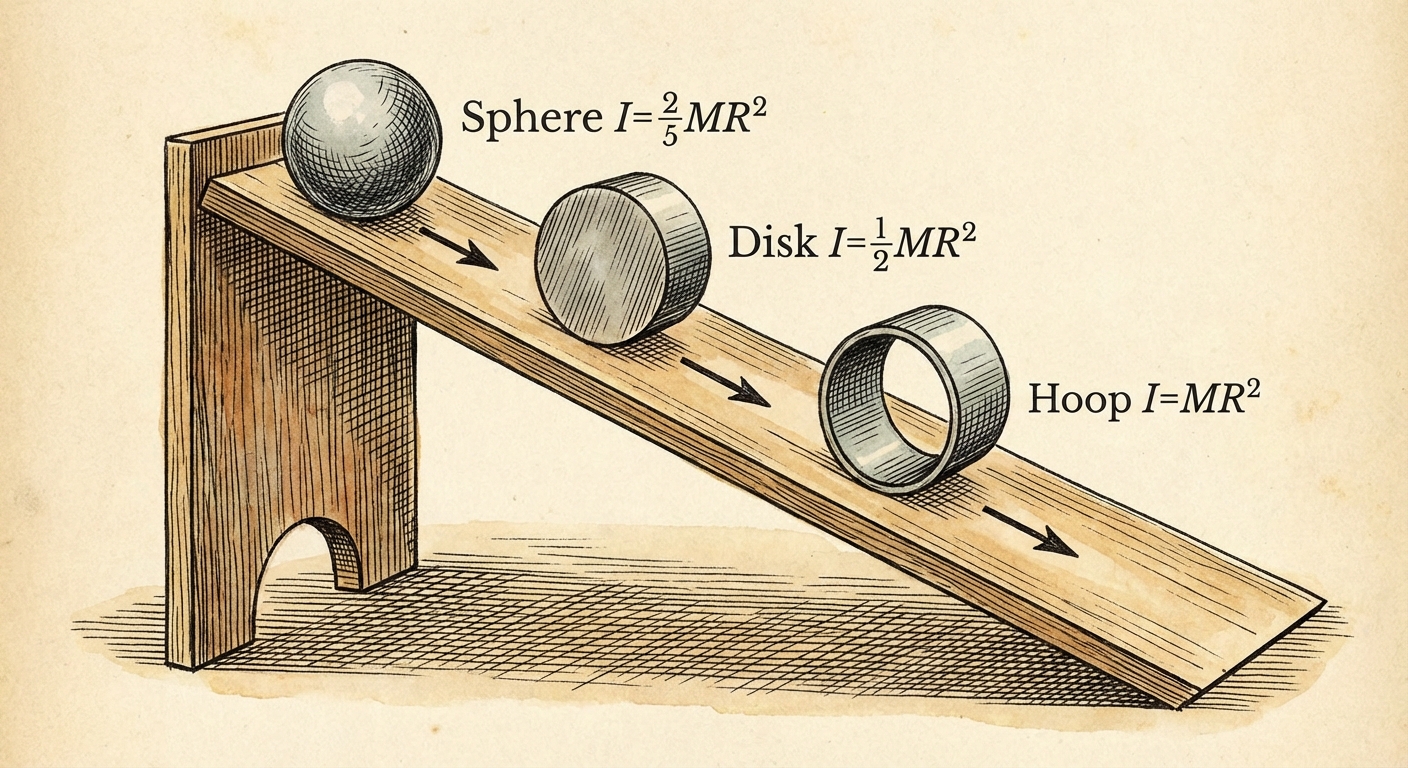
Mistake: Assuming that a sphere, disk, and hoop of the same mass and radius rolling down a ramp will reach the bottom at the same time.
Correction, The "Inertia Tax": Objects with higher Rotational Inertia (like a hoop, where mass is far from the center, $I=MR^2$) require more energy to rotate. Therefore, for a fixed amount of Potential Energy ($mgh$), the hoop puts more energy into rotation ($K{rot}$) and less into translation ($K{trans}$). The object with the smallest $I$ (the solid sphere) will have the highest translational velocity and win the race.
3. Friction and Calculation
Mistake: Thinking friction always does negative work or "steals" energy in rolling problems.
Correction: For an object rolling without slipping, the friction involved is static friction. Static friction does zero work because the contact point is momentarily at rest relative to the surface. It converts translational energy into rotational energy (or vice versa) but does not dissipate mechanical energy into heat. If the object slides (slips), kinetic friction acts, and mechanical energy is lost.
4. Forgetting the $1/2$ or Squaring
Mistake: Writing $K = I\omega$ or $K = I\omega^2$ without the half.
Correction: Remember the linear analogy $\frac{1}{2}mv^2$. The structure is identical: $\frac{1}{2}I\omega^2$.