Comprehensive Guide to Rotational Kinematics
Angular Position, Velocity, and Acceleration
Before analyzing forces or energy in rotation, you must master Rotational Kinematics—the description of how rigid bodies move in circles. In AP Physics C, this involves both algebraic equations (constant acceleration) and calculus (variable acceleration).
1. Angular Position ($\theta$)
Angular position defines the orientation of a rigid body relative to a reference axis (usually the positive x-axis).
- Symbol: $\theta$ (Theta)
- Unit: Radians (rad). Do not use degrees.
- Definition: The angle subtended by an arc length $s$ along a circle of radius $r$.
Note: For a rigid body, every point on the object rotates through the same angle $\theta$ in the same amount of time.
2. Angular Velocity ($\omega$)
Angular velocity describes how fast the object is rotating and in which direction.
- Symbol: $\omega$ (Omega)
- Unit: Radians per second (rad/s)
- Average Angular Velocity: $\omega_{avg} = \frac{\Delta \theta}{\Delta t}$
- Instantaneous Angular Velocity (Calculus Form):
3. Angular Acceleration ($\alpha$)
Angular acceleration describes the rate of change of angular velocity.
- Symbol: $\alpha$ (Alpha)
- Unit: Radians per second squared (rad/s$^2$)
- Instantaneous Angular Acceleration (Calculus Form):
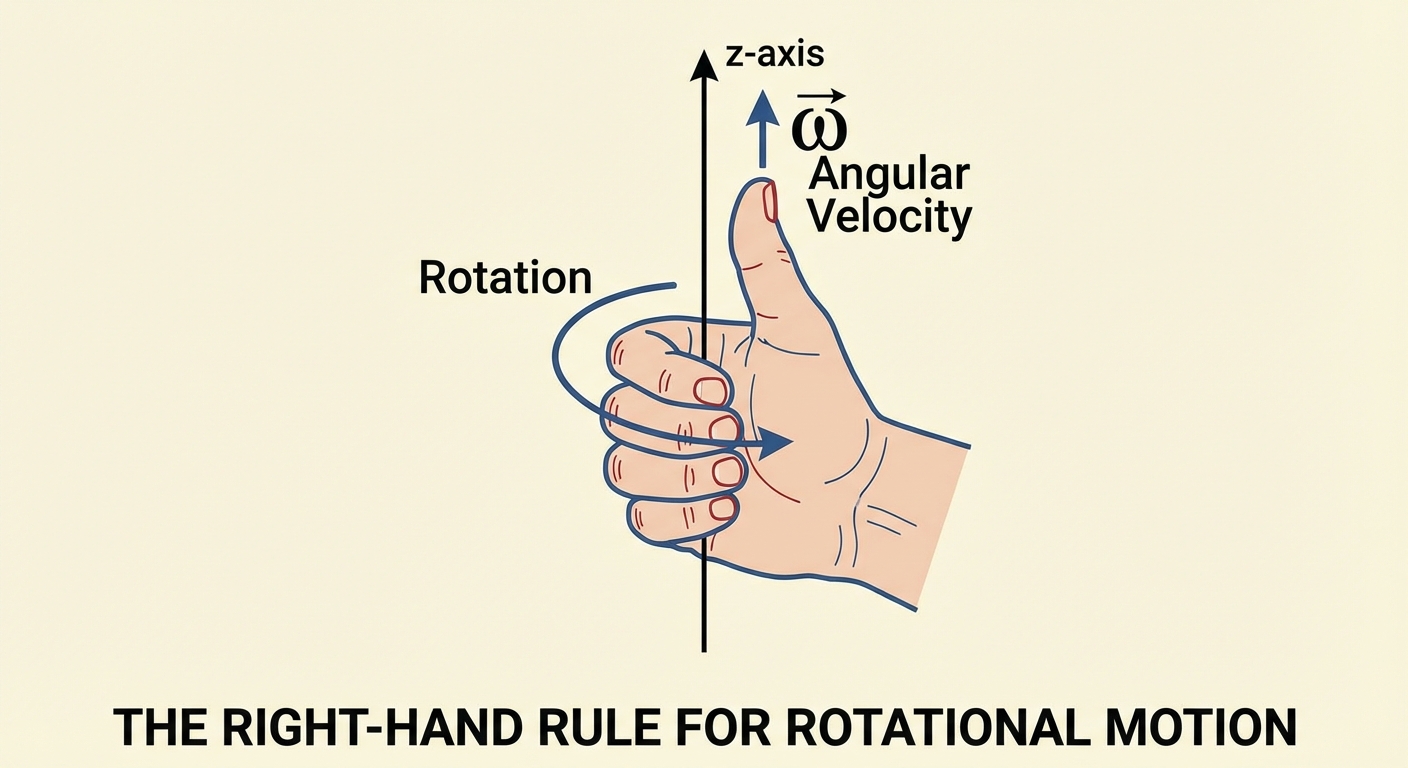
Vector Nature and the Right-Hand Rule
In Physics C, rotation is treated as a vector quantity. To determine the direction of the vector (which points along the axis of rotation):
- Curl the fingers of your right hand in the direction of rotation.
- Your thumb points in the direction of the angular velocity vector $\vec{\omega}$.
- Counter-Clockwise (CCW): Usually defined as Positive ($+\hat{k}$).
- Clockwise (CW): Usually defined as Negative ($-\hat{k}$).
Rotational Kinematics with Constant Angular Acceleration
If the angular acceleration $\alpha$ is constant, the rotational kinematic equations are perfectly analogous to the linear kinematic equations you learned in Unit 1. You should simply swap the linear variables for their rotational counterparts.
The Analogy Table
| Linear Variable | Rotational Variable |
|---|---|
| Position $x$ | Angle $\theta$ |
| Velocity $v$ | Angular Velocity $\omega$ |
| Acceleration $a$ | Angular Acceleration $\alpha$ |
| Time $t$ | Time $t$ |
The "Big Five" Rotational Equations
Velocity-Time:
Position-Time:
Velocity-Position (Time Independent):
Average Velocity:
Alternative Position-Time:
Strategy Tip: Just like linear kinematics, list your knowns and unknowns ($\theta, \omega_0, \omega, \alpha, t$). If you know three, you can find the other two.
Relating Linear and Angular Quantities
A critical skill in AP Physics C is translating between the motion of a specific point on a rotating object (linear terms) and the rotation of the object as a whole (angular terms). Imagine a point $P$ at a distance $r$ from the axis of rotation.
1. Position -> Arc Length
How far has the point traveled along the circular path?
(Note: $\theta$ must be in radians)
2. Angular Velocity -> Tangential Velocity ($v_t$)
How fast is the point moving in m/s tangent to the circle?
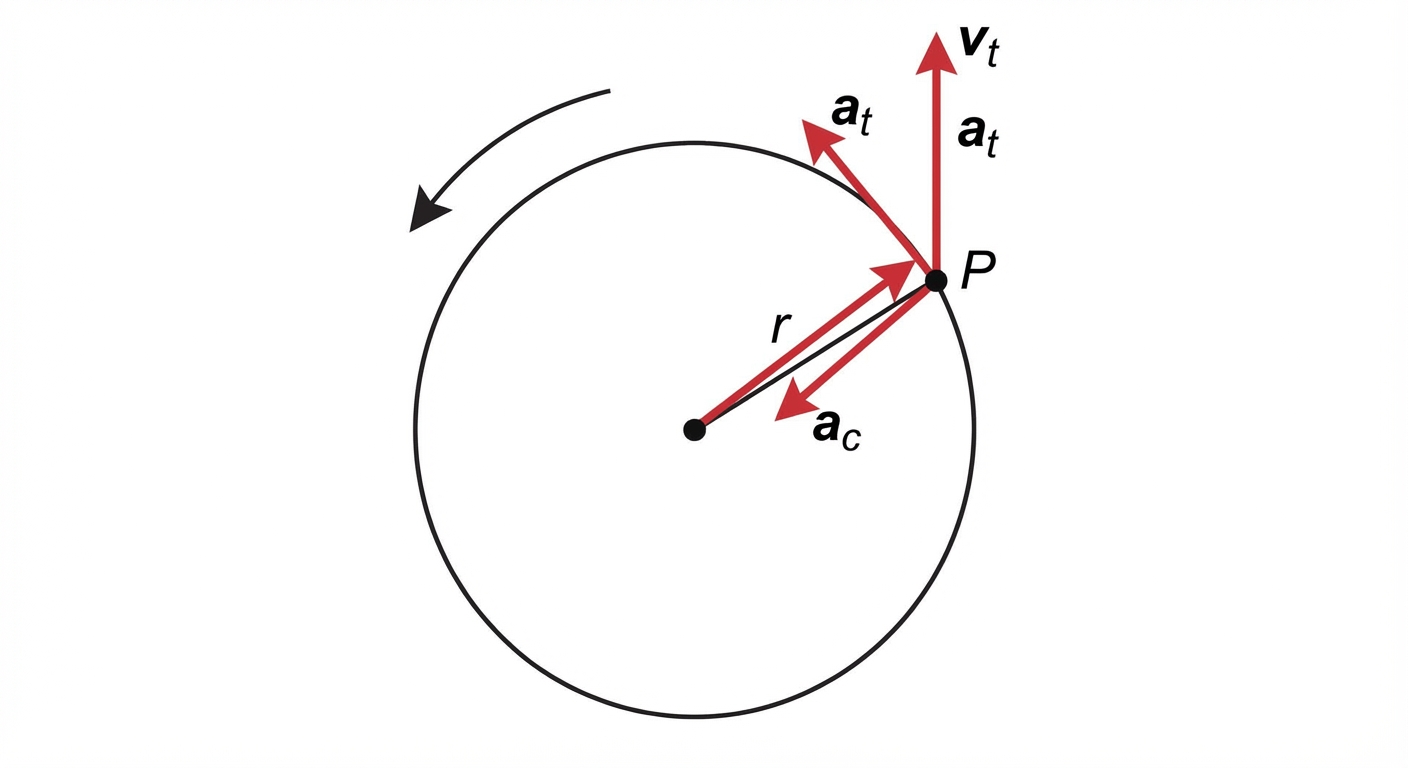
3. Acceleration Components
This is the most common area for student errors. A rotating point has two potential linear acceleration components:
A. Tangential Acceleration ($a_t$)
This component is responsible for changing the speed of the point. It exists only if angular acceleration $\alpha \neq 0$.
B. Radial (Centripetal) Acceleration ($ac$ or $ar$)
This component is responsible for changing the direction of the point. It points toward the center of the circle. It exists whenever $\omega \neq 0$.
C. Total Linear Acceleration vector ($\vec{a}$)
The total acceleration vector is the vector sum of the tangential and radial components. Since they are perpendicular:
Worked Example: The Slowing Flywheel
Problem: A flywheel with a radius of $0.5\text{ m}$ is initially rotating at $20\text{ rad/s}$. It slows down with a constant angular deceleration of $-4.0\text{ rad/s}^2$.
- How long does it take to stop?
- What is the magnitude of the total linear acceleration of a point on the rim at $t=2\text{ s}$?
Solution:
Part 1: Find $t$.
- Knowns: $\omega0 = 20$, $\omegaf = 0$, $\alpha = -4.0$.
- Use: $\omegaf = \omega0 + \alpha t$
- $0 = 20 + (-4.0)t \Rightarrow 4t = 20 \Rightarrow t = 5\text{ s}$
Part 2: Find $|\vec{a}|$ at $t=2\text{ s}$.
- First, find $\omega$ at $t=2$:
- Calculate Tangential Acceleration ($at$):
(Magnitude is $2.0\text{ m/s}^2$) - Calculate Radial Acceleration ($ac$):
- Calculate Total Acceleration:
Common Mistakes & Pitfalls
- Degree Mode: Calculus and the formula $s=r\theta$ fail if your calculator is in degrees. Always compute rotational kinematics in Radians.
- Confusing $\alpha$ and $a$: Students often assume equations like $v^2 = v_0^2 + 2a\Delta x$ use linear acceleration $a$ when the context implies rotation. Check your units: $m/s^2$ is linear ($a$), $rad/s^2$ is angular ($\alpha$).
- Forgetting $ac$: When asked for the "magnitude of the linear acceleration" of a point on a spinning wheel, students calculate $at = r\alpha$ and stop. If the wheel is spinning, you must include the centripetal component ($a_c = r\omega^2$) and do the Pythagorean sums.
- Sign Errors: Just like linear motion, be consistent with signs. If Counter-Clockwise is positive, a deceleration while spinning CCW means $\alpha$ is negative. If it is spinning CW (negative velocity) and slowing down, $\alpha$ is positive.
- Non-Rigid Bodies: These equations ($v=r\omega$, etc.) only apply to rigid bodies (objects that don’t stretch or deform).