AP Physics 1: Foundations of Rotational Dynamics
Understanding Torque
To understand rotation, we must first look at what causes it. In linear dynamics, a net force causes an acceleration. In rotational dynamics, Torque ($\tau$) is the measure of the ability of a force to cause rotation (or angular acceleration) around a specific axis.
It is crucial to remember that torque is not a force itself; it is the effectiveness of a force in producing rotation.
The Torque Formula
The magnitude of torque depends on three specific variables:
- The magnitude of the force applied ($F$).
- The distance from the pivot point (axis of rotation) to the point where the force is applied ($r$).
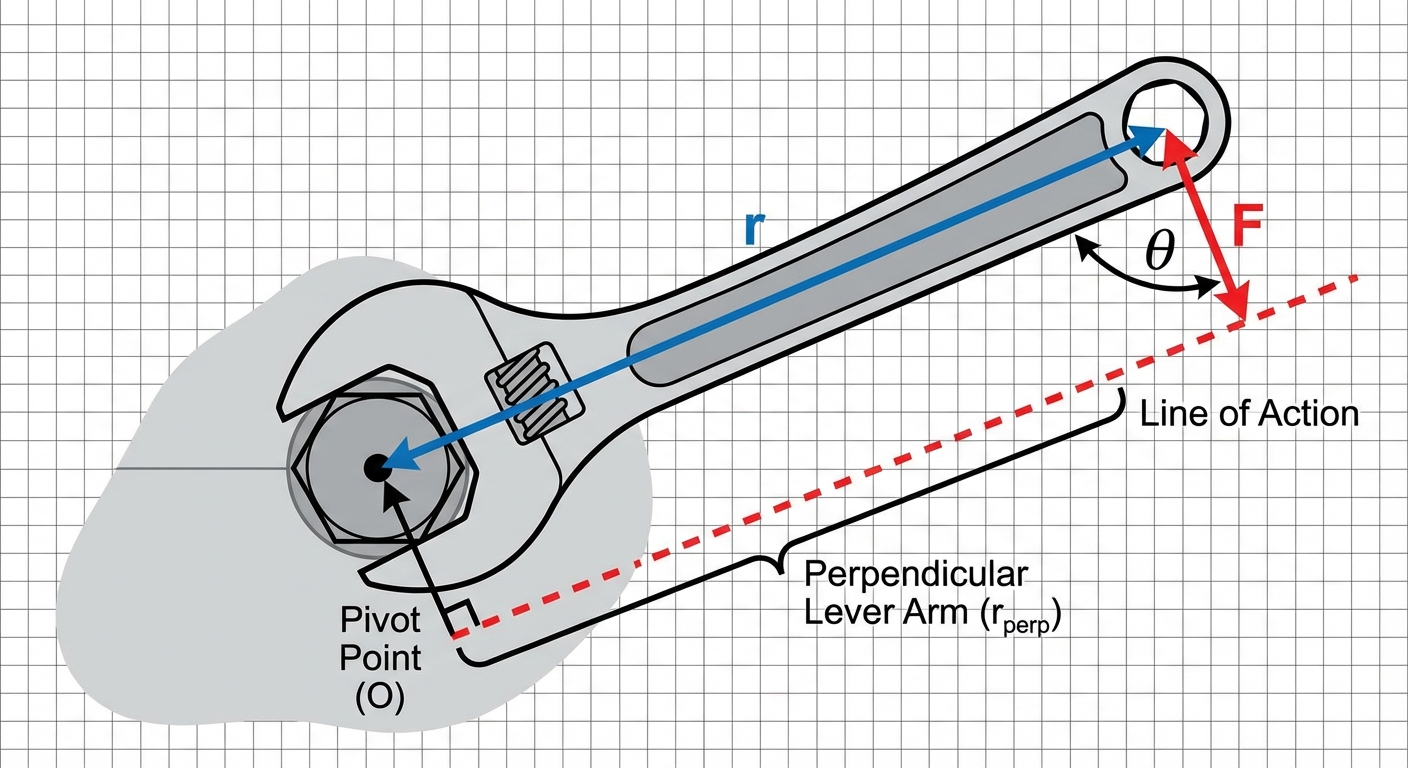
- The angle between the force vector and the radial line ($ heta$).
The general equation for torque is:
Alternatively, this can be expressed using the concept of the Lever Arm (or Moment Arm), denoted as $r_{\perp}$ (r-perpendicular). The lever arm is the perpendicular distance from the axis of rotation to the line of action of the force.
Direction and Sign Convention
In AP Physics 1, torque is a vector quantity, but we generally deal with it in one dimension (clockwise vs. counter-clockwise). The standard convention is:
- Counter-Clockwise (CCW): Positive Torque ($+\tau$)
- Clockwise (CW): Negative Torque ($-\tau$)
Static Equilibrium
For an object to be in static equilibrium, it must satisfy two conditions:
- Translational Equilibrium: Net Force is zero ($\sum F = 0$).
- CNull Rotational Equilibrium: Net Torque is zero ($\sum \tau = 0$).
This means the sum of all clockwise torques must equal the sum of all counter-clockwise torques about any chosen pivot point.
Worked Example: The Angled Wrench
Problem: You apply a force of 50 N to the end of a 0.30 m wrench. You pull at an angle of $60^{\circ}$ relative to the handle of the wrench. Calculate the torque applied to the bolt.
Solution:
- Identify variables: $r = 0.30\,\text{m}$, $F = 50\,\text{N}$, $\theta = 60^{\circ}$.
- Apply the formula:
- Calculate:
Note on Units: The SI unit for torque is the Newton-meter (N·m). While dimensionally equivalent to Joules, we never use Joules for torque to avoid confusion with Energy.
Rotational Inertia (Moment of Inertia)
Just as mass ($m$) is the measure of an object's resistance to linear acceleration, Rotational Inertia (symbol $I$) is the measure of an object's resistance to angular acceleration.
If you apply the same torque to a bicycle wheel and a semi-truck tire, the bicycle wheel will spin up much faster because it has a lower rotational inertia.
Factors Influencing Rotational Inertia
Unlike inertial mass, which is a fixed property of an object, rotational inertia depends on two factors:
- Total Mass: Heavier objects generally have higher $I$.
- Mass Distribution: This is the most critical concept. The further the mass is located from the axis of rotation, the higher the rotational inertia.
Calculating Rotational Inertia
For a system of point particles, rotational inertia is the sum of the products of each mass and its distance from the axis squared:
This equation reveals a key relationship: $I$ is proportional to $r^2$. Doubling the distance of a mass from the pivot quadruples its rotational inertia.
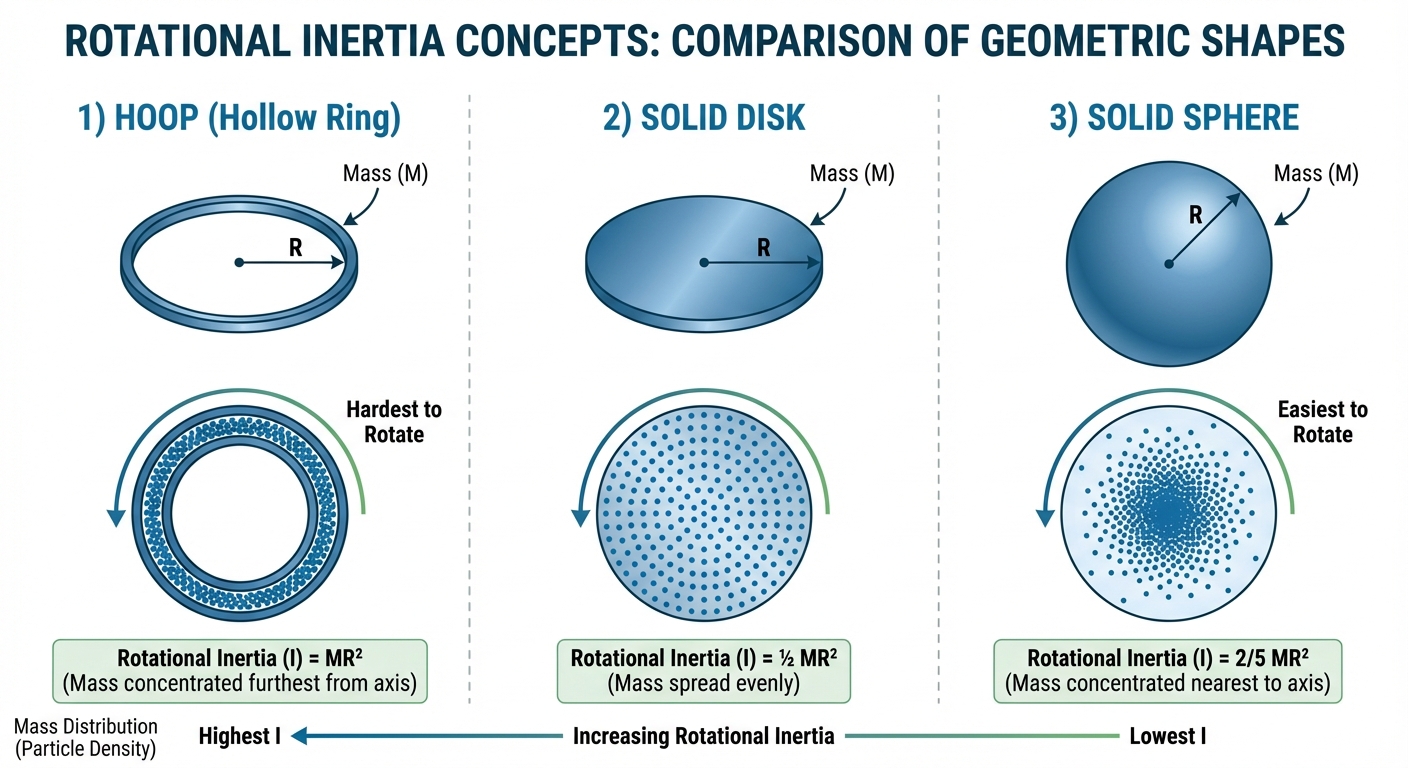
Comparing Shapes (Qualitative)
You are rarely asked to derive $I$ for continuous shapes in AP Physics 1, but you must be able to rank them. Consider three objects of equal total mass ($M$) and radius ($R$):
| Shape | Mass Distribution | Relative Inertia ($I$) | Formula (Reference) |
|---|---|---|---|
| Hoop / Thin Ring | All mass at rim (max distance) | Highest | $I = MR^2$ |
| Solid Cylinder / Disk | Mass distributed essentially from center to rim | Medium | $I = \frac{1}{2}MR^2$ |
| Solid Sphere | Mass distributed in 3D, much near center | Lowest | $I = \frac{2}{5}MR^2$ |
The Importance of the Axis
Rotational inertia is not intrinsic to the object alone; it is intrinsic to the object-axis system. A rod rotated about its center requires less torque to spin than the same rod rotated about one end.
- Rod about center: $I = \frac{1}{12}ML^2$ (Easier to rotate)
- Rod about end: $I = \frac{1}{3}ML^2$ (Harder to rotate)
This is physically intuitive: when rotating about the end, the mass at the far tip is moving through a much larger arc (higher tangential velocity) than when rotating about the center.
Newton’s Second Law for Rotation
The bridge between Torque and Rotational Inertia is Newton's Second Law for Rotation. While this moves into dynamics, understanding the definition of $\tau$ and $I$ facilitates this relationship:
Where $\alpha$ is angular acceleration (rad/s$^2$). This equation confirms that for a constant torque, increasing rotational inertia ($I$) results in a decrease in angular acceleration.
Common Mistakes & Pitfalls
Confusing Lever Arm with Distance ($r$ vs $r_{\perp}$):
- Mistake: Always multiplying Force times the length of the object.
- Correction: You must multiply the force by the perpendicular distance from the pivot. If the force acts through the pivot, torque is zero.
Ignoring the Axis of Rotation:
- Mistake: Assuming an object has a single "Moment of Inertia."
- Correction: Always ask "Rotation about which axis?" Changing the axis changes $I$.
Mass vs. Distribution:
- Mistake: Thinking the object with the most mass always has the highest $I$.
- Correction: A light hoop can have a higher $I$ than a heavy solid sphere if the hoop's radius is large enough. Distribution ($r^2$) dominates mass ($m$) in the formula.
Unit Confusion:
- Mistake: Using degrees in rotational kinematic equations or confusing N·m (Torque) with J (Work).
- Correction: While $\sin\theta$ works with degrees in the torque formula, angular acceleration requires radians. Keep Torque units as N·m, never Joules.