Comprehensive Notes: Systems of Particles and Linear Momentum
4.1 Center of Mass
Definition and Concept
The Center of Mass (COM) is a unique point in a system where the weighted relative position of the distributed mass sums to zero. Effectively, it is the point where the entire mass of the system ($M$) can be treated as if it were concentrated at a single particle for the purpose of analyzing translational motion.
- Free-Body Diagrams: When drawing an FBD for an extended object, gravity acts downward from the COM.
- Symmetry: For a homogeneous (uniform density) body, the COM is at the geometric center.
Mathematical Formulation
1. System of Discrete Particles
For a system of $n$ particles, the position vector of the center of mass $\vec{r}_{cm}$ is the weighted average of the positions of individual particles.
Where:
- $M = \sum m_i$ (Total mass of the system)
- $\vec{r}_i$ = Position vector of the $i$-th particle
Broken into components:
2. Continuous Objects (Calculus Approach)
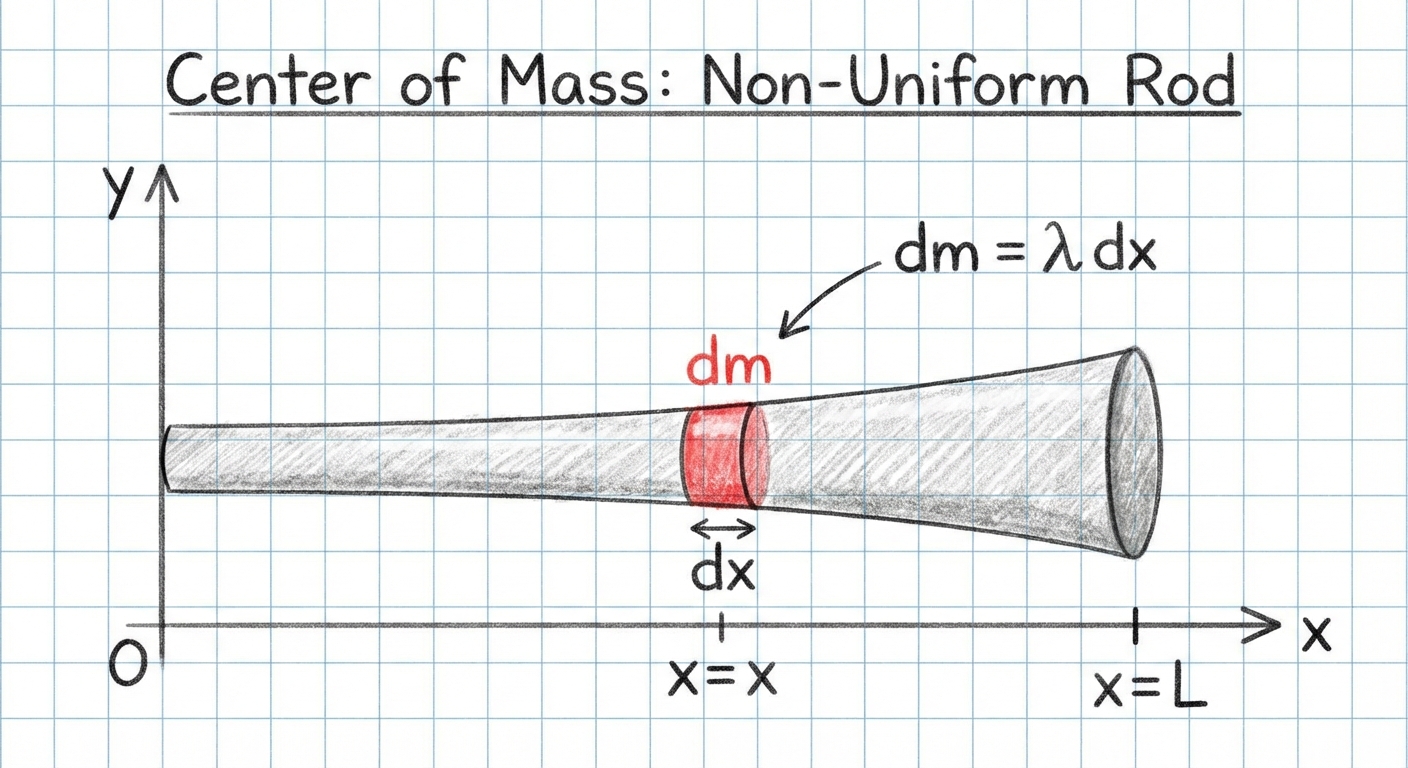
For extended objects where mass is distributed continuously (like a rod, disk, or sphere), we replace the summation with an integral.
To solve this, you must express the differential mass element $dm$ in terms of spatial coordinates ($dx$, $dy$, or $dr$) using density.
| Dimension | Density Concept | Symbol | Formula for $dm$ |
|---|---|---|---|
| 1D (Line) | Linear Density | $\lambda$ (lambda) | $dm = \lambda \, dx$ |
| 2D (Area) | Surface Density | $\sigma$ (sigma) | $dm = \sigma \, dA$ |
| 3D (Volume) | Volumetric Density | $\rho$ (rho) | $dm = \rho \, dV$ |
Worked Example: Non-Uniform Rod
Problem: A rod of length $L = 0.30\text{ m}$ lies along the x-axis with one end at the origin. It has a linear density $\lambda = 10 + 6x$ (in kg/m). Determine the total mass and the x-coordinate of the center of mass.
Solution:
- Define $dm$: Since $\lambda = \frac{dm}{dx}$, we have $dm = (10 + 6x)dx$.
- Calculate Total Mass ($M$): Integrate $dm$ over the length.
- Calculate Center of Mass ($x{cm}$):
Center of Mass vs. Center of Gravity
Though often used interchangeably, they are distinct concepts:
- Center of Mass (COM): Depends only on mass distribution. Invariant.
- Center of Gravity (COG): The average location of the gravitational force acting on the object.
- Comparison: In a uniform gravitational field (like near Earth's surface), COM and COG are at the same location. They only differ in non-uniform fields (e.g., a satellite explicitly large enough that gravity is stronger at one end than the other).
4.2 Impulse and Linear Momentum
Linear Momentum
Linear momentum ($\vec{p}$) is a vector describing the "quantity of motion."
- Unit: kg·m/s or N·s
- Newton's Second Law (General Form): The net external force equals the time rate of change of momentum.
Note: This form covers cases where mass changes (like rockets), whereas $\vec{F}=m\vec{a}$ assumes constant mass.
Impulse
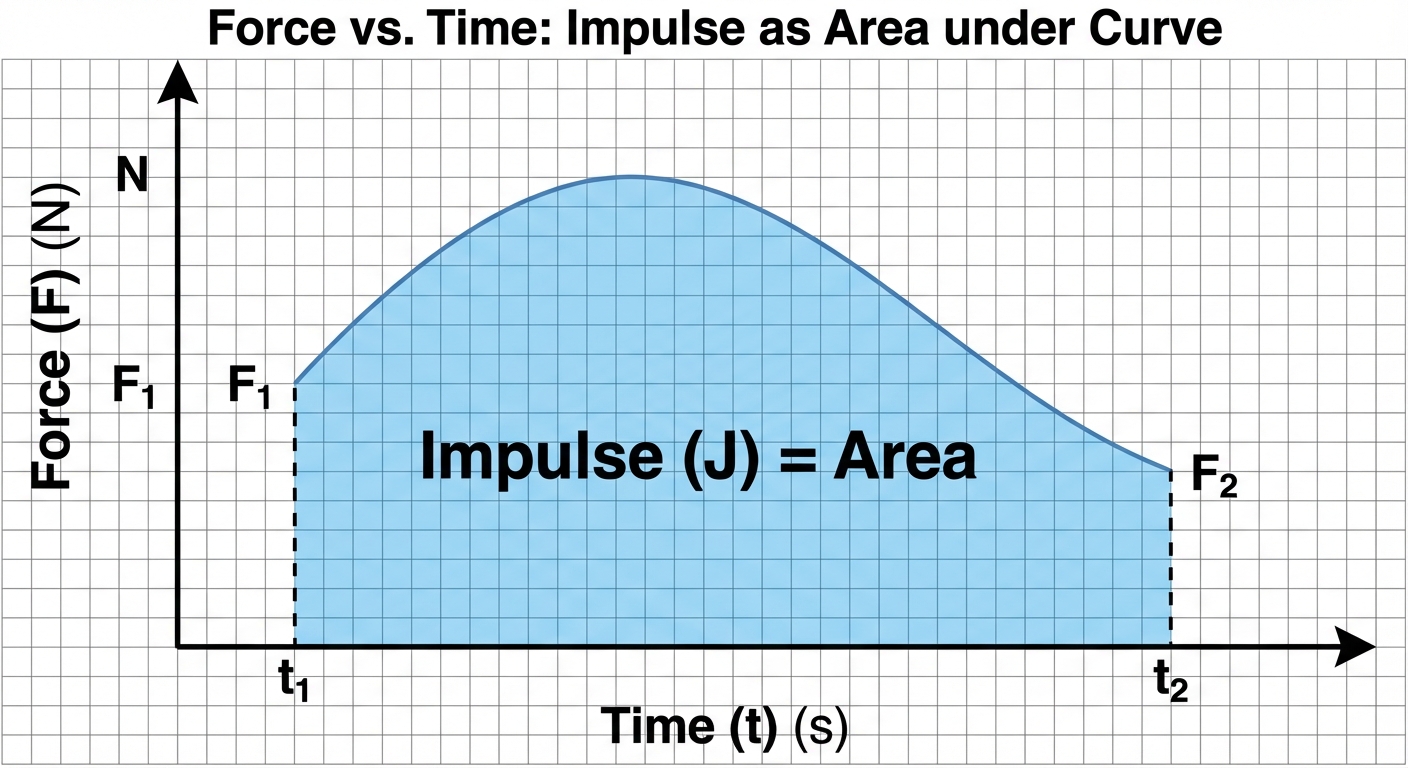
Impulse ($\vec{J}$) is the change in momentum resulting from a force applied over a time interval.
- Graphical Interpretation: On a Force vs. Time graph, Impulse is the area under the curve.
Example: The Kicker
Problem: A 0.4 kg football is kicked from rest to 30 m/s in 8 ms (0.008 s). Find the average force.
Solution:
- Find Impulse ($|\vec{J}|$):
- Find Average Force ($F{avg}$):
4.3 Conservation of Linear Momentum
The Conservation Law
For a closed system (no mass enters/leaves) and an isolated system (no net external forces), total linear momentum is conserved.
Internal vs. External Forces
- Internal Forces: Forces between objects within the system (e.g., a spring connecting two carts, or the collision force between two cars). These pairs cancel out according to Newton's 3rd Law and do not change the system's total momentum.
- External Forces: Forces from outside (e.g., friction from the track, gravity). These do change the system's total momentum.
Collisions
Collisions are interactions where large internal forces act over short time intervals. We categorize them based on energy conservation.
| Type of Collision | Momentum Conserved? | Kinetic Energy Conserved? | Characteristics |
|---|---|---|---|
| Elastic | Yes | Yes | Objects bounce perfectly; no deformation/heat loss. |
| Inelastic | Yes | No | Objects bounce but lose KE to heat/sound/deformation. |
| Perfectly Inelastic | Yes | No (Max Loss) | Objects stick together and move with a common velocity ($\,v_f$). |
Mnemonic:
- Elastic = Energy matches.
- Inelastic = Internal energy changes (KE lost).
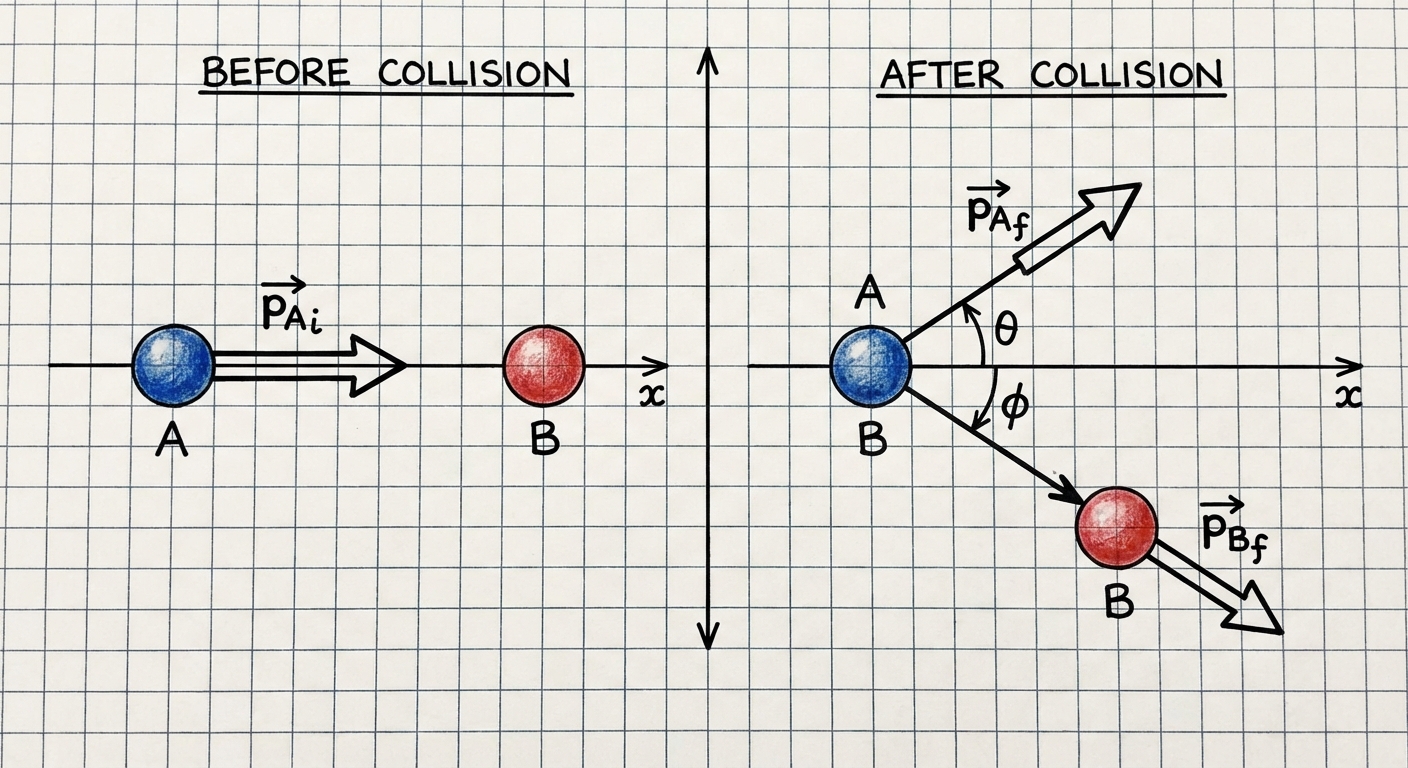
2D Collisions
Momentum is a vector! You must conserve momentum in the x-direction and y-direction independently.
Sample Problem: Perfectly Inelastic Collision
Problem: An astronaut ($M=89$ kg) floating at rest throws a 1 kg tool at 9 m/s away from a ship. How fast does the astronaut move?
Solution:
System = Astronaut + Tool. No external forces.
The negative sign indicates motion opposite to the tool.
4.4 Motion of the Center of Mass
The Center of Mass moves as if it were a single particle of mass $M_{total}$ subject to the net external force on the system.
Velocity of COM
- If $\vec{p}{system}$ is conserved (no external force), then $\vec{v}{cm}$ is constant.
Acceleration of COM
- Explosion Example: If a projectile is launched and explodes in mid-air (internal forces only), the fragments fly in all directions, but the center of mass continues to follow the original parabolic trajectory (until fragments hit the ground).
Common Mistakes & Pitfalls
- Sign Errors: Momentum is a vector. If a ball hits a wall at $v$ and bounces back at $v$, the change in velocity is $v - (-v) = 2v$, not zero. Forgetting the negative sign is the #1 error.
- Integrating Wrong Variable: In COM calculus problems, remembering to convert $dm$ to $\lambda dx$ is crucial. Do not just integrate $\int x dx$.
- Confusing Energy and Momentum: Momentum is conserved in all collisions (isolated systems). Kinetic Energy is conserved only in elastic collisions.
- Component Confusion: In 2D collisions, never add x-momentum to y-momentum. Treat equations separately.
- Center of Mass Acceleration: Students often think internal forces (like an engine inside a car or a spring between blocks) accelerate the COM. They do not. Only external forces (friction from road) accelerate the COM.