Unit 6: Oscillations and Dynamics of Periodic Motion
Fundamentals of Simple Harmonic Motion (SHM)
Simple Harmonic Motion (SHM) is a specific type of periodic motion where the restoring force is directly proportional to the displacement and acts in the direction opposite to that of displacement. This is the cornerstone of studying oscillations in AP Physics C.
Defining Characteristics
For a system to undergo SHM, it must satisfy two conditions:
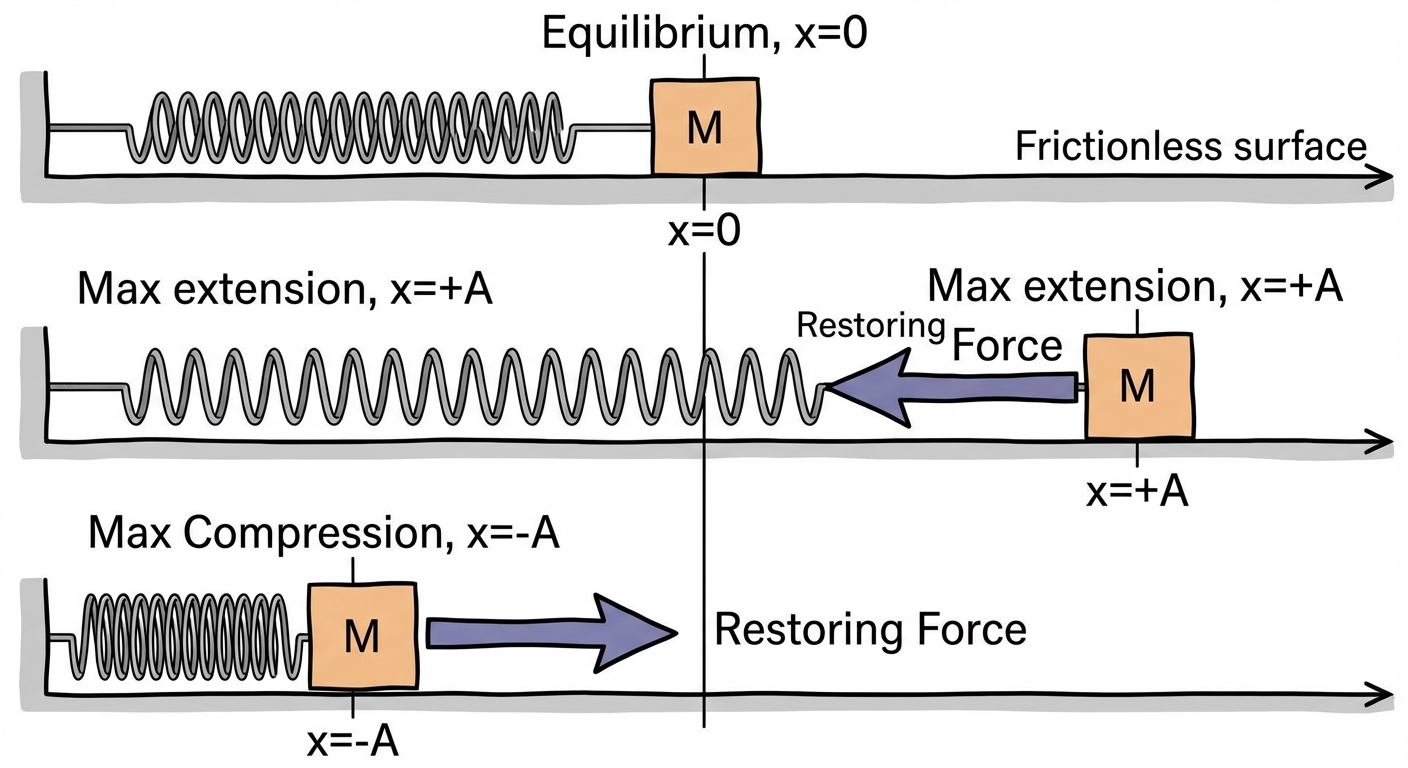
- There must be an equilibrium position where the net force is zero.
- When displaced from equilibrium, a linear restoring force acts to return the object to equilibrium.
Mathematically, the restoring force is defined by Hooke's Law:
Where:
- $F$ is the restoring force (N)
- $k$ is the constant of proportionality (force constant or spring constant in N/m)
- $x$ is the displacement from equilibrium (m)
- The negative sign indicates the force opposes the displacement.
The Differential Equation of SHM
In AP Physics C, you must be able to derive the equation of motion using calculus. We start by applying Newton's Second Law ($F_{net} = ma$) to the restoring force.
Derivation
Using the restoring force $F = -kx$:
Since acceleration is the second derivative of position ($a = \frac{d^2x}{dt^2}$), we can rewrite this as a second-order linear differential equation:
Rearranging to standard form:
This is the Differential Equation of Simple Harmonic Motion. Any system whose dynamics can be reduced to this form $\left( \frac{d^2x}{dt^2} + \omega^2 x = 0 \right)$ is undergoing simple harmonic motion.
The Solution (Kinematics)
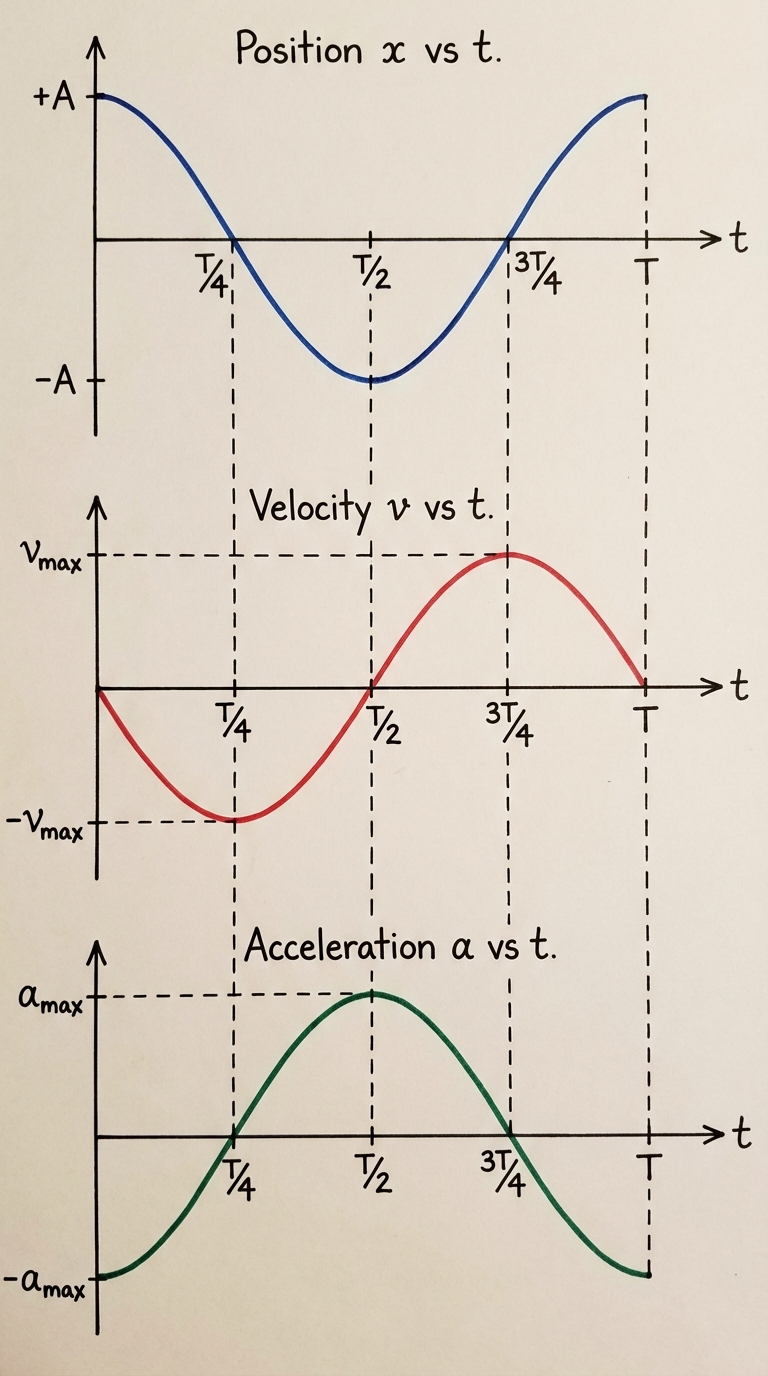
The solution to this differential equation is a sinusoidal function representing position over time:
Where:
- $A$ is the Amplitude (maximum displacement).
- $\omega$ is the Angular Frequency (rad/s).
- $\phi$ is the Phase Constant (determined by initial conditions at $t=0$).
By taking derivatives of position, we find velocity and acceleration functions:
Notice that $a(t) = -\omega^2 x(t)$, which confirms the proportional relationship between acceleration and position.
Period and Frequency
While Period ($T$) and Frequency ($f$) are scalar quantities, Angular Frequency ($\omega$) is the bridge between the physical constants of the system (like mass and stiffness) and the kinematics.
Relationship Definitions
- Period ($T$): Time to complete one full cycle (seconds).
- Frequency ($f$): Cycles per second (Hertz).
- Angular Frequency ($\omega$): Radians per second.
Mass-Spring Systems
For a specific case of a mass $m$ attached to an ideal spring with constant $k$:
From the differential equation $\frac{d^2x}{dt^2} + \frac{k}{m}x = 0$, we identify $\omega^2 = \frac{k}{m}$.
Thus, the angular frequency is:
The period of a spring-mass system is:
Vertical Springs vs. Horizontal Springs
A common point of confusion is the vertical spring. When a mass hangs vertically, gravity stretches the spring to a new equilibrium point $x_{eq} = mg/k$. The period of oscillation remains the same ($T = 2\pi\sqrt{m/k}$) regardless of whether the spring is horizontal or vertical; gravity only shifts the equilibrium position, it does not change the restoring force dynamics relative to that equilibrium.
Pendulums
Pendulums are treated as SHM only under the Small Angle Approximation (typically $\theta < 10^\circ$ or $0.2$ rad), where $\sin(\theta) \approx \theta$.
1. The Simple Pendulum
A point mass $m$ at the end of a massless string of length $L$.
- Restoring Torque: $\tau = -L(mg \sin\theta) \approx -Lmg\theta$
- Rotational Inertia: $I = mL^2$
- Newton's Second Law for Rotation: $\tau = I\alpha \rightarrow -Lmg\theta = (mL^2)\frac{d^2\theta}{dt^2}$
This simplifies to $\frac{d^2\theta}{dt^2} + \frac{g}{L}\theta = 0$. From this, we derive the period:
Note: The period of a simple pendulum is independent of the mass.
2. The Physical Pendulum
A rigid body of arbitrary shape pivoting about a point distance $d$ from its Center of Mass (CoM).
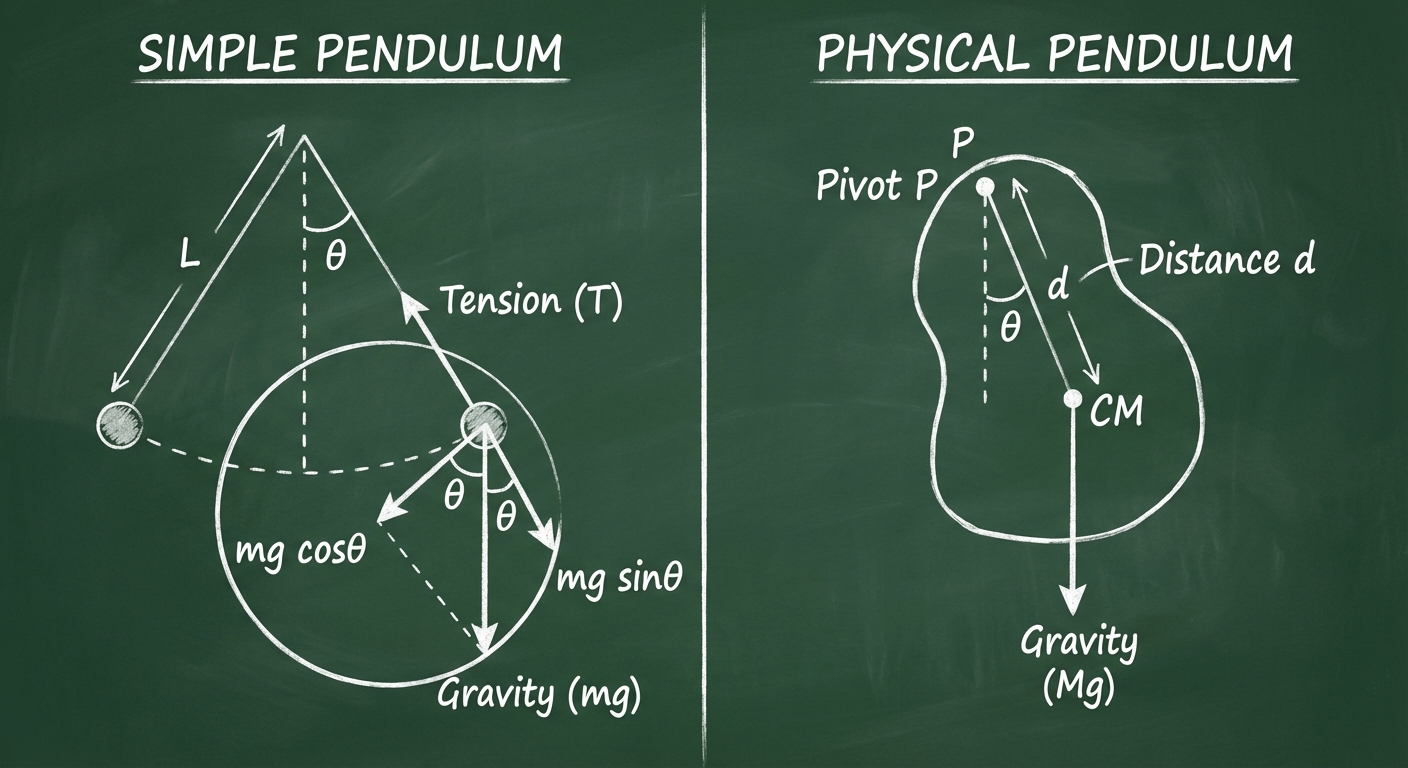
- Restoring Torque: $\tau = -mgd\sin\theta \approx -mgd\theta$
- Rotational Inertia: $I$ (about the pivot, often found using Parallel Axis Theorem)
Differential Equation:
Period of a Physical Pendulum:
This formula is powerful; note that if you treat a simple pendulum as a physical pendulum where $I=mL^2$ and $d=L$, this formula reduces back to $T = 2\pi\sqrt{L/g}$.
Energy in SHM
In an ideal system (no friction/damping), mechanical energy is conserved. It continuously transforms between Kinetic Energy ($K$) and Potential Energy ($U$).
Total Mechanical Energy ($E$)
At any point in time:
- Max Potential Energy: At $x = \pm A$ (turning points), velocity is zero. $U_{max} = \frac{1}{2}kA^2$.
- Max Kinetic Energy: At $x = 0$ (equilibrium), potential energy is zero (usually). $K{max} = \frac{1}{2}mv{max}^2$.
- Velocity Relationship: By equating $E{total}$ at amplitude and equilibrium, we find $v{max} = A\omega$.
Common Mistakes & Pitfalls
- Calculator Mode: Always use RADIANS mode for SHM calculations involving trig functions ($\cos(\omega t)$). Using degrees will yield incorrect values for position and velocity.
- Confusing Frequency and Angular Frequency:
- $f$ is oscillations per second (Hz).
- $\omega$ is radians per time (rad/s).
- Watch equations carefully; $x(t) = A\cos(2\pi f t)$ is valid, but $x(t) = A\cos(ft)$ is wrong.
- Pendulum Mass: Students often try to include mass involved in simple pendulum period calculations. Remember, $T = 2\pi\sqrt{L/g}$ (Mass cancels out).
- Physical Pendulum "d": In the physical pendulum formula ($T = 2\pi \sqrt{I/mgd}$), $d$ is the distance from the pivot to the center of mass, not the total length of the object.
- Negative Signs in Force: Forgetting the negative sign in $F = -kx$ implies the force pushes the mass away from equilibrium, which describes exponential growth, not oscillation.