AP Physics C: Fundamentals of Work and Energy
Foundations of Work and Energy
In AP Physics C: Mechanics, Unit 3 marks a transition from Newtonian Dynamics (vector-based analysis of forces and acceleration) to Energy Methods (scalar-based analysis of systems). The concept of work provides the bridge between force and energy.
Physicists define Work differently than everyday language. It is not about mental effort or fatigue; it is strictly a measure of energy transfer that occurs when an object is moved over a distance by an external force.
Work Done by Constant Forces
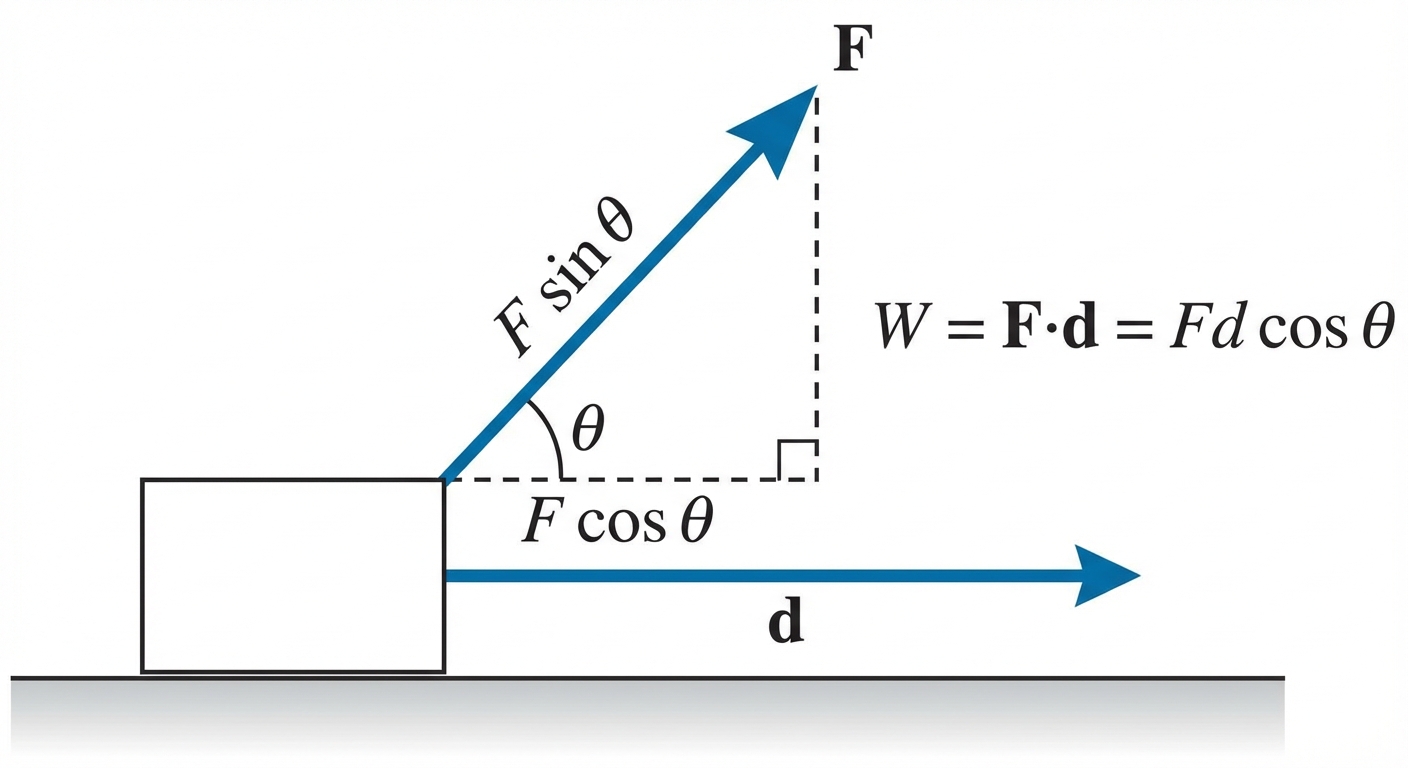
At its simplest level, work is the product of the component of constant force acting in the direction of motion and the magnitude of the displacement.
The Scalar Product Definition
For a constant force $\vec{F}$ acting on an object undergoing a displacement $\Delta\vec{r}$ (or $\vec{d}$), the work $W$ is defined by the dot product:
W = \vec{F} \cdot \Delta\vec{r} = F|\Delta\vec{r}| \cos(\theta)
Where:
- $F$ is the magnitude of the force.
- $|\Delta\vec{r}|$ is the magnitude of the displacement (distance $d$).
- $\theta$ is the angle between the force vector and the displacement vector.
Note: Work is a scalar quantity. It has magnitude but no direction.
- Unit: Joule (J), where $1 \text{ J} = 1 \text{ N} \cdot \text{ m}$.
Interpreting the Sign of Work
The sign of work tells us about the energy transfer:
| Angle ($\theta$) | Value of $\cos \theta$ | Work Sign | Physical Meaning |
|---|---|---|---|
| $0^\circ \le \theta < 90^\circ$ | Positive | $(+)$ | Force puts energy into the system (speeds it up). |
| $\theta = 90^\circ$ | Zero | $0$ | Force is perpendicular to motion; no energy transfer (e.g., Normal Force). |
| $90^\circ < \theta \le 180^\circ$ | Negative | $(-)$ | Force takes energy out of the system (slows it down, like friction). |
Calculating via Vector Components
If the force and displacement are given in unit-vector notation ($\hat{i}, \hat{j}, \hat{k}$):
W = \vec{F} \cdot \Delta\vec{r} = (Fx \Delta x) + (Fy \Delta y) + (F_z \Delta z)
Work Done by Variable Forces (Calculus Approach)
In the real world, forces are rarely constant. Springs change force as they stretch; gravity varies with significant distance from a planet. When force $F(x)$ changes as a function of position, we must use calculus.
The Integral Definition
To calculate work done by a variable force, we break the displacement into infinitesimally small segments $dx$. Over such a small segment, the force is effectively constant. We sum these contributions using an integral:
W = \int{xi}^{xf} Fx(x) \, dx
In three dimensions, this becomes a line integral over a path $C$:
W = \int{path} \vec{F} \cdot d\vec{r} = \int{xi}^{xf} Fx dx + \int{yi}^{yf} Fy dy + \int{zi}^{zf} F_z dz
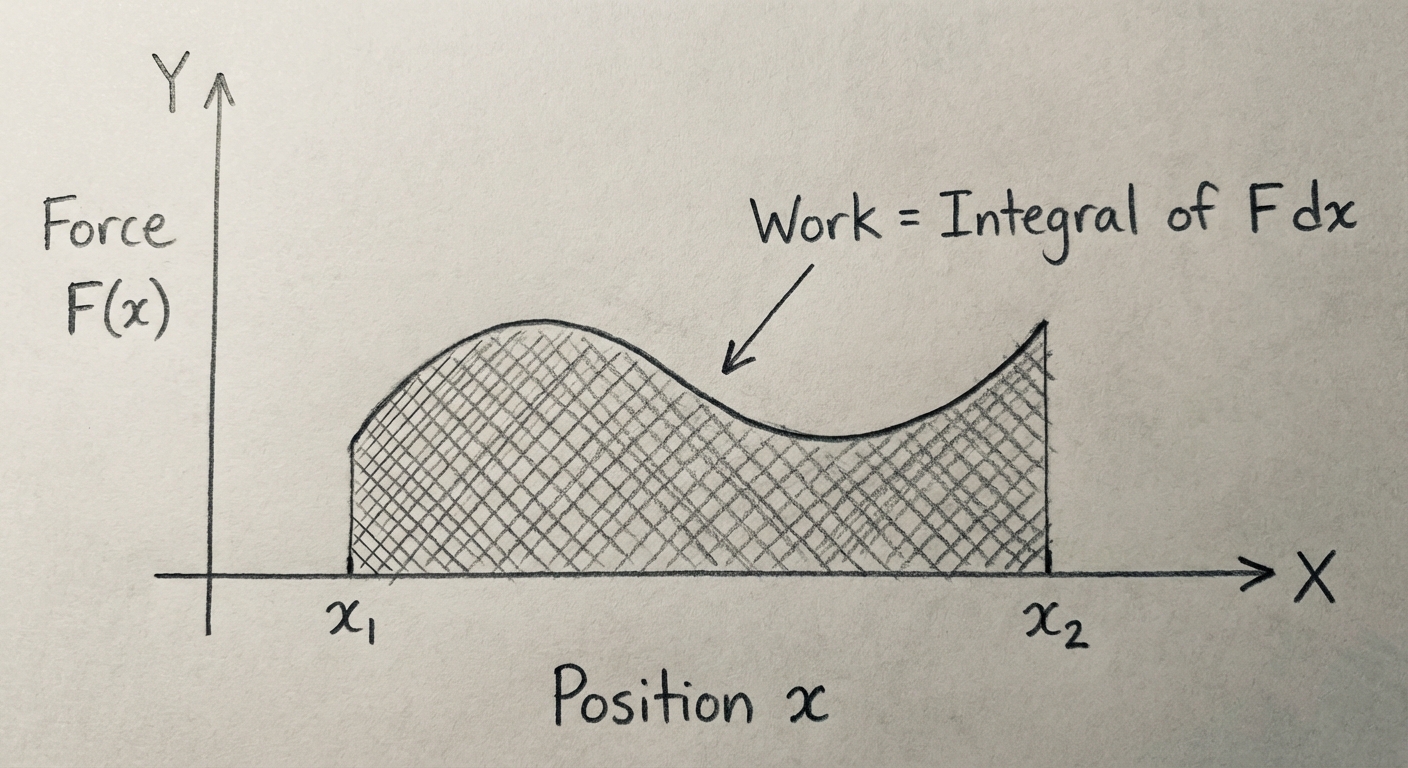
Graphical Interpretation
On a graph of Force vs. Position ($F$ vs. $x$), the work done is represented by the area under the curve between the initial and final positions.
- Area above the x-axis: Positive work.
- Area below the x-axis: Negative work.
Example: Hooke's Law (Springs)
A classic variable force in AP Physics C is the ideal spring, described by Hooke's Law: $\vec{F}_s = -k\vec{x}$.
To find the work done by an external agent to stretch a spring from equilibrium ($x=0$) to a distance $x=L$ (where the applied force must oppose the spring force, $F_{app} = kx$):
W{app} = \int{0}^{L} (kx) \, dx = \left[ \frac{1}{2}kx^2 \right]_0^L = \frac{1}{2}kL^2
This result is the Elastic Potential Energy stored in the spring.
The Work-Energy Theorem
The Work-Energy Theorem is the central pillar of this unit. It connects the action of forces (Work) to the motion of the object (Speed).
Kinetic Energy
First, we define translational Kinetic Energy ($K$)—the energy of motion:
K = \frac{1}{2}mv^2
The Theorem Statement
The Work-Energy Theorem states that the net work done on an object equals the change in its kinetic energy.
W{net} = \Delta K = Kf - Ki
W{net} = \frac{1}{2}mvf^2 - \frac{1}{2}mvi^2
Critical Conditions
- Net Work: You must calculate the work done by the net force ($\vec{F}{net}$) OR sum the work done by every individual force acting on the object (gravity, friction, normal, applied).
W{net} = W{gravity} + W{friction} + W_{applied} + \dots - Point Particle Model: This theorem strictly applies to rigid bodies or point particles. If an object deforms (like a car crash) or rotates, additional energy terms (internal energy, rotational kinetic energy) are involved.
Derivation Example (1D Constant Force)
Using Newton's Second Law ($F{net} = ma$) and kinematics ($vf^2 = v_i^2 + 2a\Delta x$):
- Multiply kinematics eq by $\frac{1}{2}m$:
\frac{1}{2}m vf^2 = \frac{1}{2}m vi^2 + ma\Delta x - Substitute $F{net} = ma$:
\frac{1}{2}m vf^2 - \frac{1}{2}m vi^2 = F{net} \Delta x
\Delta K = W_{net}
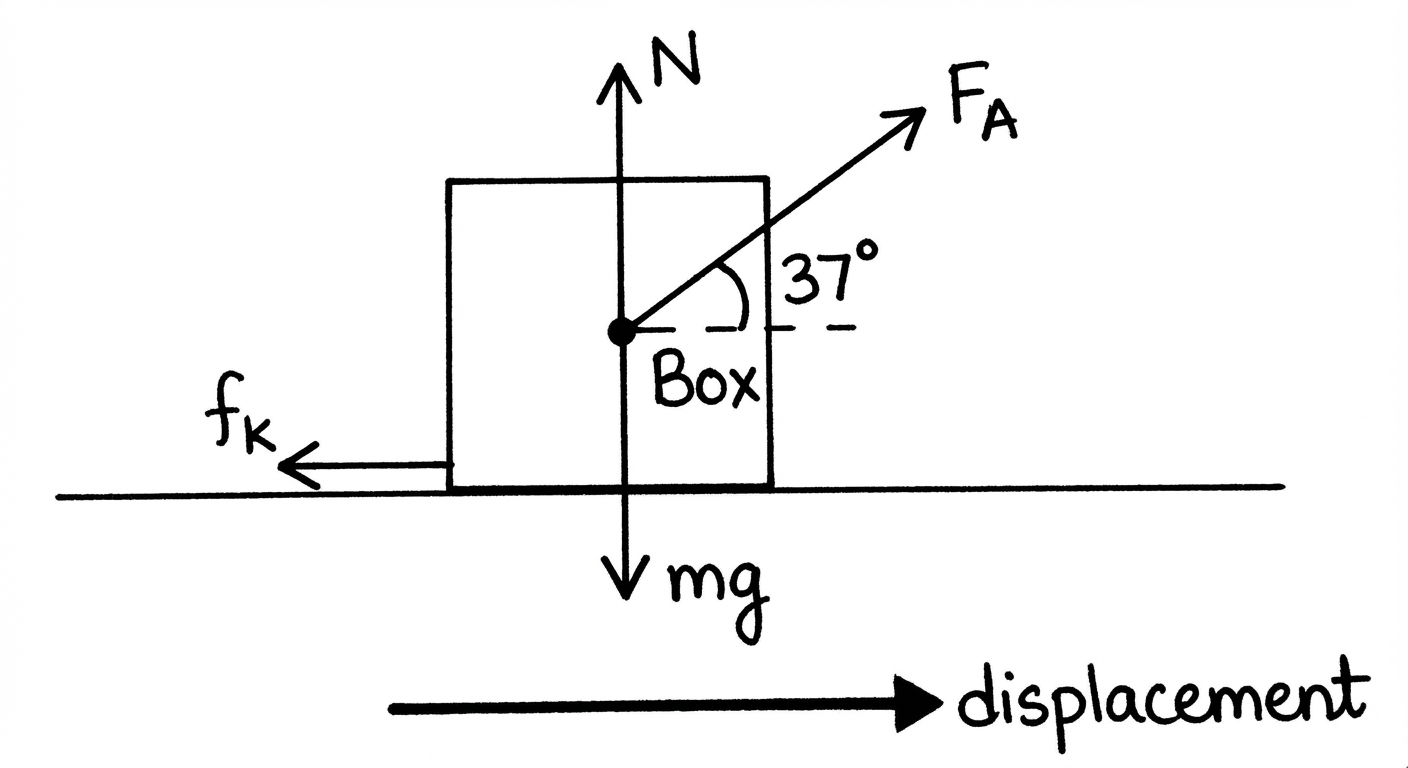
Worked Example: Block on a Rough Surface
Problem: A 5.0 kg box is pulled 10 m across a rough horizontal floor by a constant force of 20 N applied at an angle of $37^\circ$ above the horizontal. The coefficient of kinetic friction is $\mu_k = 0.1$. The box starts from rest. Find the final speed.
Solution:
Identify Forces:
- Applied Force ($F_A = 20$ N, $\theta=37^\circ$)
- Gravity ($mg = 5 \cdot 9.8 = 49$ N, Down)
- Normal Force ($N$, Up)
- Friction ($f_k$, Left/Opposing motion)
Calculate Normal Force (Vertical equilibrium $\sum Fy = 0$): N + FA \sin(37^\circ) - mg = 0
N + 20(0.6) - 49 = 0 \implies N = 49 - 12 = 37 \text{ N}Calculate Individual Works:
- Applied Force: $WA = FA d \cos(37^\circ) = 20(10)(0.8) = 160 \text{ J}$
- Normal Force: $W_N = N d \cos(90^\circ) = 0 \text{ J}$
- Gravity: $W_g = mg d \cos(90^\circ) = 0 \text{ J}$ (since motion is horizontal)
- Friction: $fk = \muk N = 0.1(37) = 3.7 \text{ N}$. Angle is $180^\circ$.
$Wf = fk d \cos(180^\circ) = 3.7(10)(-1) = -37 \text{ J}$
Apply Work-Energy Theorem:
W{net} = 160 + 0 + 0 - 37 = 123 \text{ J} W{net} = \Delta K = \frac{1}{2}mvf^2 - 0 123 = \frac{1}{2}(5)vf^2 \implies v_f = \sqrt{\frac{2(123)}{5}} \approx 7.01 \text{ m/s}
Common Mistakes & Pitfalls
1. Wrong Angle ($\theta$) Selection
- Mistake: Always using the angle of the incline or the angle given in the problem without thinking.
- Correction: The angle $\theta$ in $W=Fd\cos\theta$ is strictly the angle between the force vector and the displacement vector. Draw them tail-to-tail to check.
- For friction, $\theta = 180^\circ$ (usually).
- For Normal force, $\theta = 90^\circ$.
2. Confusing Work Done by a Specific Force vs. Net Work
- Mistake: Calculating $W_{applied}$ and setting it equal to $\Delta K$.
- Correction: The Work-Energy Theorem requires the NET work ($W_{net}$). You must subtract work done by friction or gravity if they oppose motion.
3. Integration Errors
- Mistake: Pulling constants out of the integral that aren't constants.
- Correction: If a force depends on position (e.g., $F = 3x^2$), you cannot write $W = F \int dx$. You must integrate the function: $\int 3x^2 dx = x^3$.
4. Signs in Coordinate Systems
- Mistake: Double counting negatives. (e.g., writing Work = $-fd$ and then plugging in a negative displacement).
- Correction: Stick to the formal definitions. Either use magnitudes and logic ($F \cdot d \cdot \cos(180)$) OR use formal vector notation ($F_x \Delta x$). Don't mix methods.